Other Parts Discussed in Thread: CONTROLSUITE, C2000WARE
Hello Team,
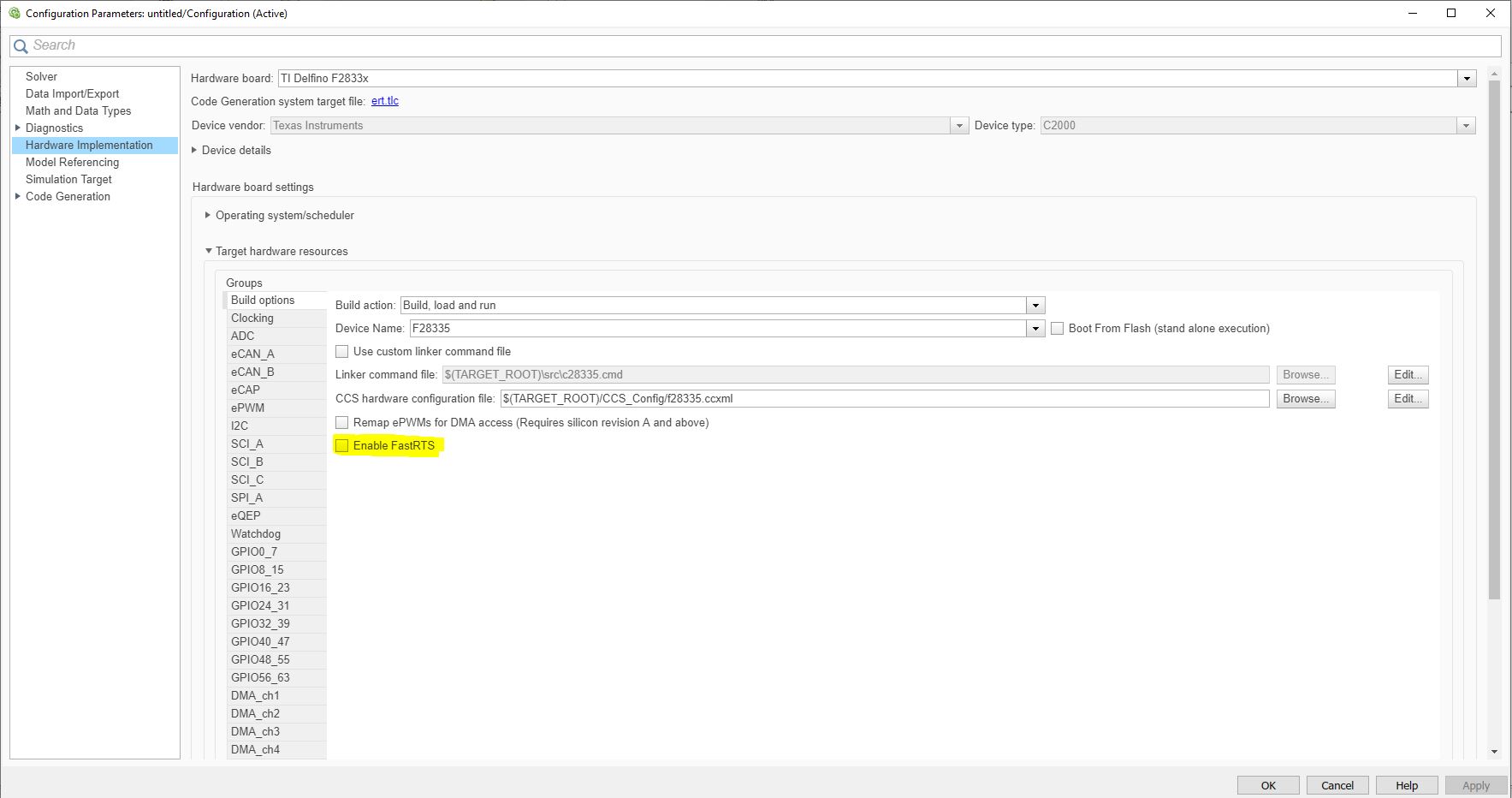
I am using MATLAB and Embedded coder with TI c2000 supported package installer.
I need to develop model for TMS320F28234 MCU and generate code for the same.
But in the C2000 package for TMS320F2823x series there is no library/Blocks are available.
Instead it mention to use TMS320F2833x series things.
I used 2833x blocks and generated code for simple gpio toggle to check in the Hard ware.
I generated code for 2833x as its only available after I loaded the code in 28234 MCU .
But I am not able to see the output as gpio is not toglling.
Then I referred the example files from C2000 and loaded the example of gpio_toggle from 2823x folder its working, But 2833x its not working.
(here I am referring the example of controlsuite device support files)
Can anybody help me how can I get support for 2823x series or how I can use 2833x for code generation?
A quick response will be appreciated.
Thanks in advance!
Regards,
Ashrumochan