Other Parts Discussed in Thread: CONTROLSUITE
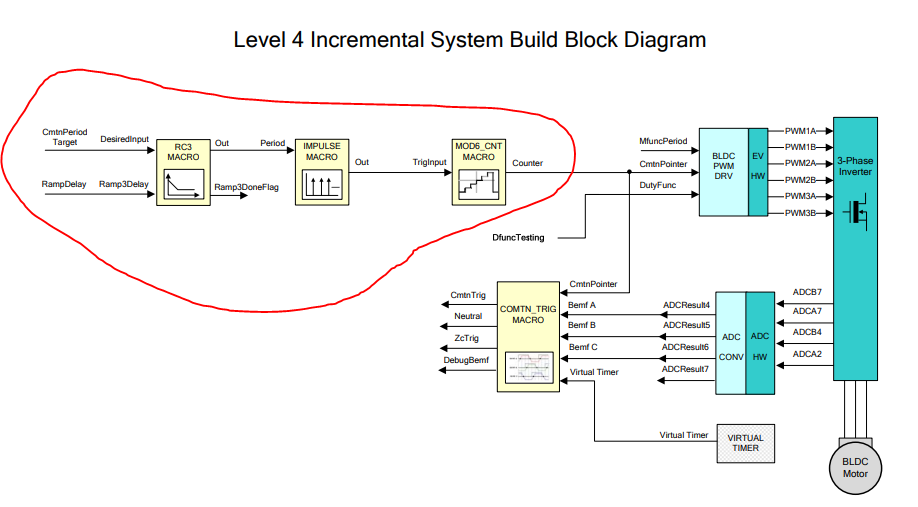
Hello! I am implementing a sensorless BLDC control on a C2000 MCU, following the document found here:
Right now I have problems with measureing the back-emf of my BLDC that is necessary for sensorless control. According to the text in the link above, the BEMF can be obtained by measuring the non-energized phase. I have measured the phase with an oscilloscope, but i have problems interpreting what is going on. Could I get some help here?
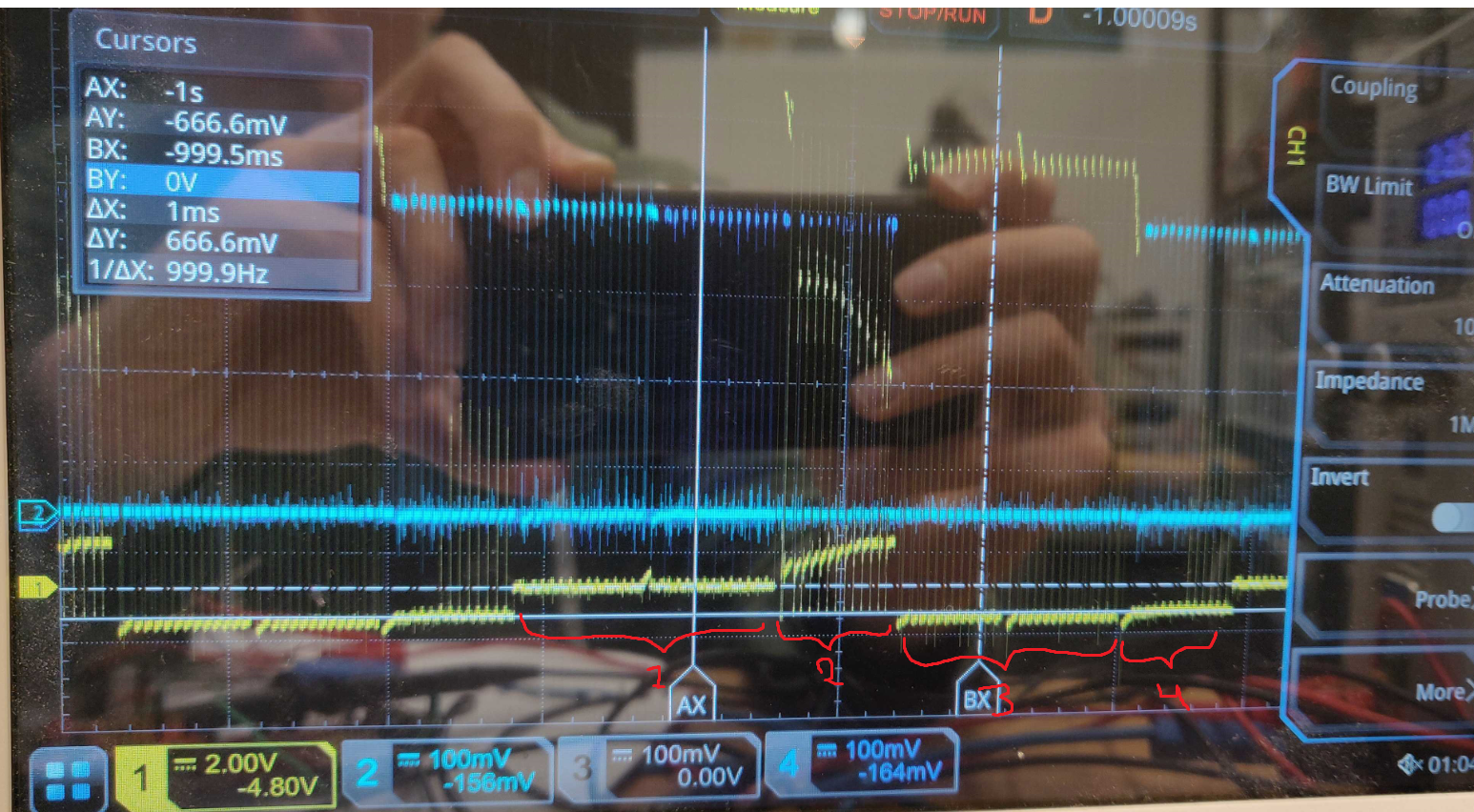
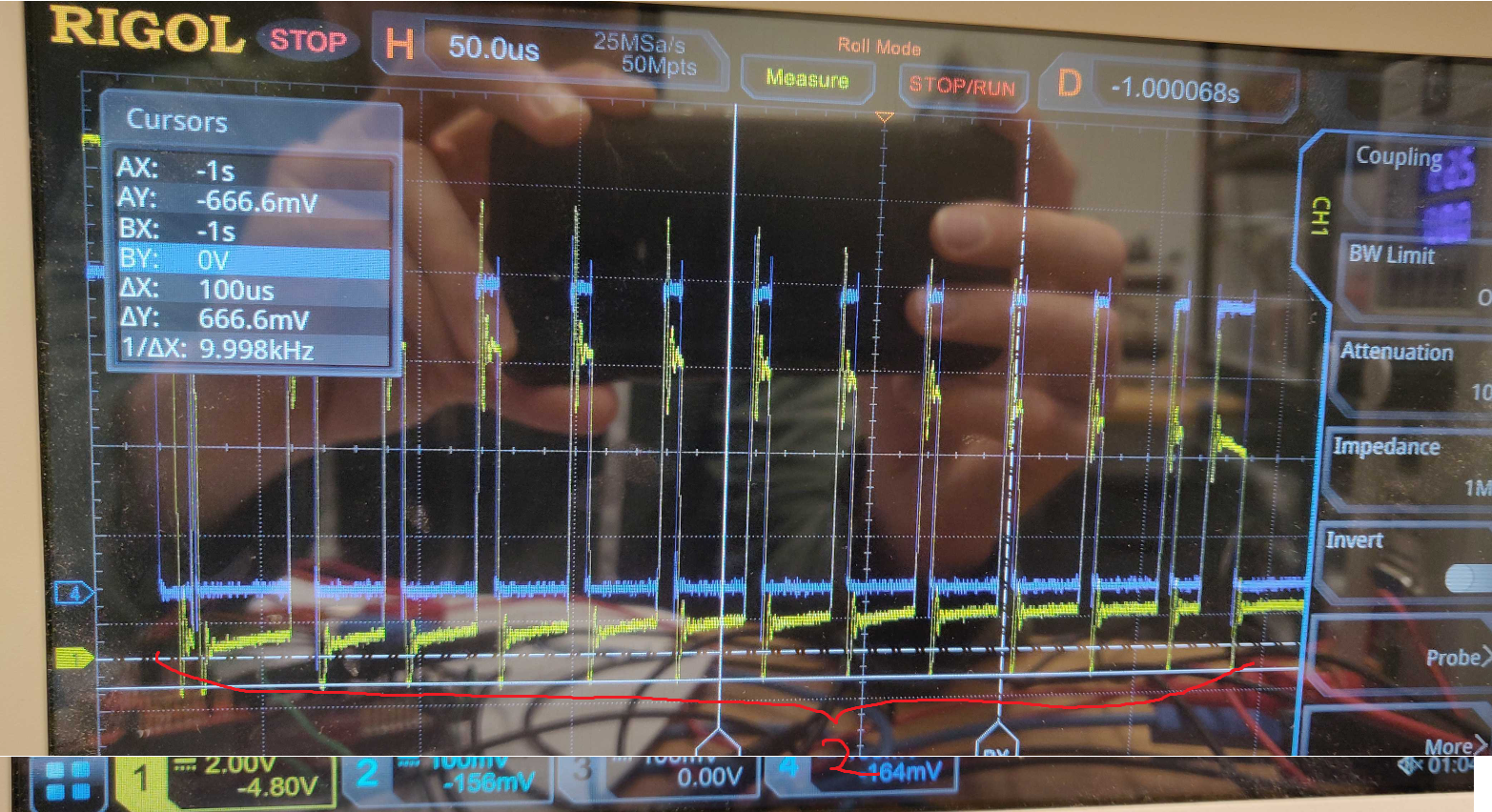
Yellow is the phase measurement (directly on phase, no filtering). Blue and turquoise are the PWMs of the other two phases. During time period 1, the phase that I measure on is energized (lower transistor ON -> zero volts). During time period 2, I suspect I am seeing the BEMF. During 3, the phase is energized again with top transistor PWMed. During time period 4 I do not know what's going on. The voltage is -0.7V during T4.
So I should filter this signal and use it during time period 2?