Part Number: TMS320F28379D
Other Parts Discussed in Thread: C2000WARE, CONTROLSUITE
Hi community!
I am using an absolute encoder (RM44SC) in my test-bench. According to the datasheet of the encoder, it has Vdd, GND, CLK+,CLK-, Data+, and Data-. I have converted the differential signals using RS485. Hence, I have now only CLK and Data. Would someone please let me know how can I use the SPI configurations of TMS320F28379D to send a clocking signal to encoder and receive the data?
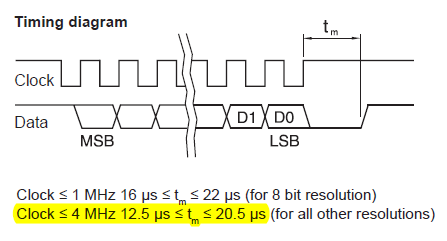
The timing diagram presented in the datasheet is as follows:
Regards.