Part Number: TMS320F28069
Other Parts Discussed in Thread: TIDA-00176, CONTROLSUITE, C2000WARE
Hi,
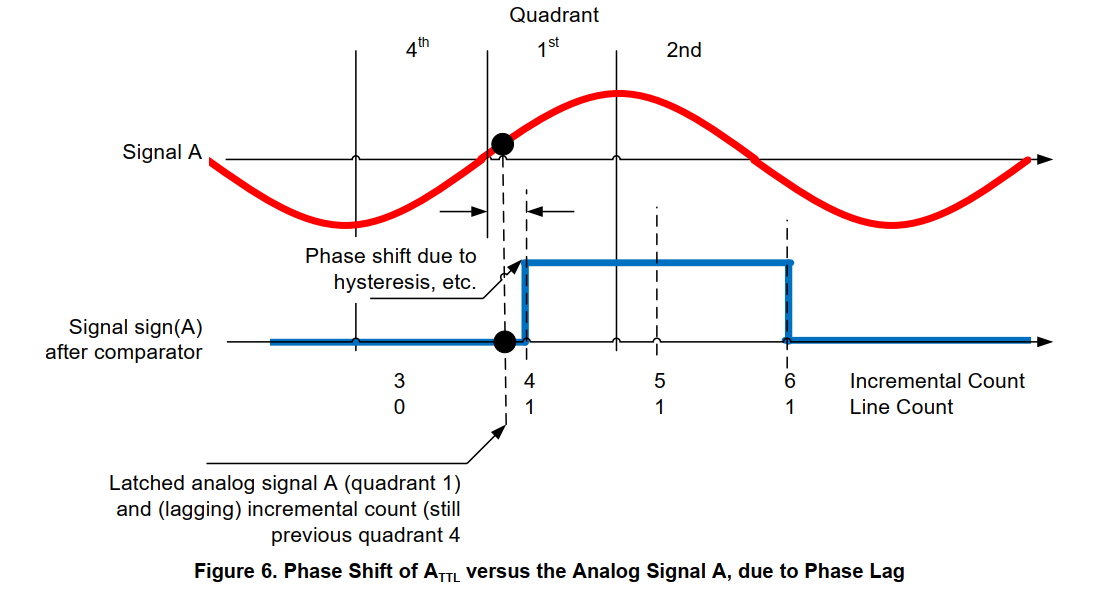
I cannot understand the sin/cos encoder phase shift correction method in TIDUA05A. When I programmed in DSP with this method, the position will step down when sine signal A cross the zero and then step up when QEP(Signal A after comparator) steps/changes ,shown in the fig 3. And as speed/frequency rises, the phase shift will increase/change, how could we correct it? Thanks.