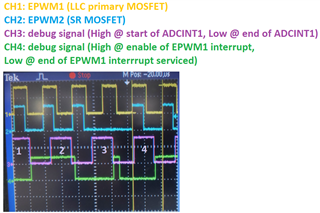
I am using F28035 for LLC converter control.
I am having a problem with two of the interrupts -- ADCINT1 and EPWM1;
ADCINT1 interrupt = used for ADC and loop calculations; period = 40kHz; triggered by EPWM3;
EPWM1 interrupt = used to updated EPWM1&2 parameters; shadowed; triggered by EPWM1 count = CAU;
EPWM1 interrupt = used to updated EPWM1&2 parameters; shadowed; triggered by EPWM1 count = CAU;
EPWM1 interrupt is enabled right after the ADCINT1 interrupt;
Note that ADCINT1 is not sync'd to EPWM1&2;
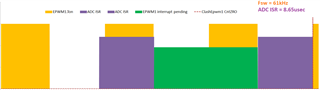
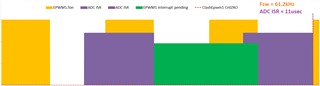
I am encountering problems when the EPWM1 interrupt remains pending when the ADCINT1 interrupt gets serviced on its next ADC cycle.
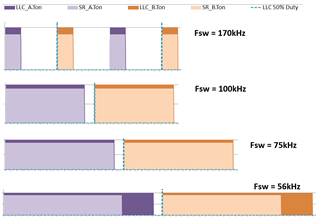
The problem manifests as EPWM1 and/or EPWM2 parameters not updated correctly at the same time.
I have played around with different EPWM1 settings and the problem persists.
I am encountering problems when the EPWM1 interrupt remains pending when the ADCINT1 interrupt gets serviced on its next ADC cycle.
The problem manifests as EPWM1 and/or EPWM2 parameters not updated correctly at the same time.
I have played around with different EPWM1 settings and the problem persists.
There will always be some transient condition leading to a change in switching frequency wherein the problem will be caught.
I have read about TMS320F2803x Piccolo TRM's section 1.6.3.1. Rule #1;
I want to use it to clear the pending EPWM1 interrupt at the start of ADCINT1 routine.
But...
1) Does implementing Rule#1 solve my problem?
2) Do you have an example on how to implement it?
3) Can the EPWM1 interrupt's PIEIFR be cleared while inside ADCINT1?
I want to use it to clear the pending EPWM1 interrupt at the start of ADCINT1 routine.
But...
1) Does implementing Rule#1 solve my problem?
2) Do you have an example on how to implement it?
3) Can the EPWM1 interrupt's PIEIFR be cleared while inside ADCINT1?
4) Any other possibly better ideas? Basically, I need to freely and correctly update EPWM1&2 parameters after ADCISR calculations;
Thanks,
dom