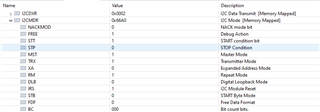
I am using an I2C example "i2c_ex4_eeprom_polling.c". At the very start of the code when the program checks for connected I2C devices it executes the following code. The "I2CBusScan", GPIO initialization, and I2C initialization are also shown. The problem I am facing is when the code reaches I2C_sendStartCondition(base); in function I2CBusScan(). It sets the STT bit (shown in the attached image) high. According to the datasheet SPRUHM81 page 2331, the STT bit should come back to Zero after the I2C_sendStartCondition(base); command. However, in my case, it stays at one. When I stay at one then the condition while(!(I2C_getStatus(base) & I2C_STS_REG_ACCESS_RDY)); becomes true and the loop continues for infinite time.
Sometimes it works. But most of the time it will stick at this line. Also, sometimes when I unplug and replug LAUNCHXL-F28379D it starts working again for some time and then stops working again. I don't understand what is the problem. I am using a sensor from Analog Devices ADXL345.
Thank you
// Initialize device clock and peripherals
//
Device_init();
//
// Disable pin locks and enable internal pullups.
//
Device_initGPIO();
//
// Initialize I2C pins
//
I2C_GPIO_init();
//
// Initialize PIE and clear PIE registers. Disable CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
I2Cinit();
//SerialBegin(9600);
//I2Cs connected to I2CA will be found in AvailableI2C_slaves buffer
//after you run I2CBusScan function.
uint16_t *pAvailableI2C_slaves = AvailableI2C_slaves;
status = I2CBusScan(I2CA_BASE, pAvailableI2C_slaves);
uint16_t I2CBusScan(uint32_t base, uint16_t *pAvailableI2C_slaves)
{
uint16_t probeSlaveAddress, i;
//Disable interrupts on Stop condition, NACK and arbitration lost condition
I2C_disableInterrupt(base, (I2C_INT_ADDR_SLAVE|I2C_INT_STOP_CONDITION | I2C_INT_ARB_LOST | I2C_INT_NO_ACK));
i = 0;
for(probeSlaveAddress=1;probeSlaveAddress<=MAX_10_BIT_ADDRESS;probeSlaveAddress++)
{
//Check I2C bus status
status = checkBusStatus(base);
if(status)
{
ESTOP0;
return status;
}
I2C_setConfig(base, (I2C_MASTER_SEND_MODE | I2C_REPEAT_MODE));
//Enable 10-bit addressing if probeSlaveAddress is greater than 127U
if(probeSlaveAddress > MAX_7_BIT_ADDRESS)
{
//10-bit addressing
I2C_setAddressMode(base, I2C_ADDR_MODE_10BITS);
}
// Setup slave address
I2C_setSlaveAddress(base, probeSlaveAddress);
I2C_sendStartCondition(base);
uint16_t stts = I2C_getStatus(base);
//Wait for the slave address to be transmitted
while(!(I2C_getStatus(base) & I2C_STS_REG_ACCESS_RDY));
//Generate STOP condition
I2C_sendStopCondition(base);
//Wait for the I2CMDR.STP to be cleared
while(I2C_getStopConditionStatus(base));
//Wait for the Bus busy bit to be cleared
while(I2C_isBusBusy(base));
uint16_t I2CStatus = I2C_getStatus(base);
//If Slave address is acknowledged, store slave address
//in pAvailableI2C_slaves
if(!(I2CStatus & I2C_STS_NO_ACK))
{
pAvailableI2C_slaves[i++] = probeSlaveAddress;
}
//Clear NACK bit in I2CSTR
I2C_clearStatus(base,I2C_STS_NO_ACK|I2C_STS_ARB_LOST|I2C_STS_REG_ACCESS_RDY|I2C_STS_STOP_CONDITION);
}
I2C_setConfig(base, (I2C_MASTER_SEND_MODE));
I2C_setAddressMode(base, I2C_ADDR_MODE_7BITS); //7-bit addressing
I2C_enableInterrupt(base, (I2C_INT_ADDR_SLAVE|I2C_INT_STOP_CONDITION | I2C_INT_ARB_LOST | I2C_INT_NO_ACK));
return SUCCESS;
}
void I2C_GPIO_init(void)
{
// I2CA pins (SDAA / SCLA)
GPIO_setDirectionMode(DEVICE_GPIO_PIN_SDAA, GPIO_DIR_MODE_IN);
GPIO_setPadConfig(DEVICE_GPIO_PIN_SDAA, GPIO_PIN_TYPE_PULLUP);
GPIO_setMasterCore(DEVICE_GPIO_PIN_SDAA, GPIO_CORE_CPU1);
GPIO_setQualificationMode(DEVICE_GPIO_PIN_SDAA, GPIO_QUAL_ASYNC);
GPIO_setDirectionMode(DEVICE_GPIO_PIN_SCLA, GPIO_DIR_MODE_IN);
GPIO_setPadConfig(DEVICE_GPIO_PIN_SCLA, GPIO_PIN_TYPE_PULLUP);
GPIO_setMasterCore(DEVICE_GPIO_PIN_SCLA, GPIO_CORE_CPU1);
GPIO_setQualificationMode(DEVICE_GPIO_PIN_SCLA, GPIO_QUAL_ASYNC);
GPIO_setPinConfig(DEVICE_GPIO_CFG_SDAA);
GPIO_setPinConfig(DEVICE_GPIO_CFG_SCLA);
}
void I2Cinit(void)
{
//myI2CA initialization
I2C_disableModule(I2CA_BASE);
I2C_initMaster(I2CA_BASE, DEVICE_SYSCLK_FREQ, 400000, I2C_DUTYCYCLE_33);
I2C_setConfig(I2CA_BASE, I2C_MASTER_SEND_MODE);
//I2C_setSlaveAddress(I2CA_BASE, 80);
//I2C_setOwnSlaveAddress(I2CA_BASE, 96); //I2CA address
I2C_disableLoopback(I2CA_BASE);
I2C_setBitCount(I2CA_BASE, I2C_BITCOUNT_8);
//I2C_setDataCount(I2CA_BASE, 2);
I2C_setAddressMode(I2CA_BASE, I2C_ADDR_MODE_7BITS);
I2C_enableFIFO(I2CA_BASE);
I2C_clearInterruptStatus(I2CA_BASE, I2C_INT_ARB_LOST | I2C_INT_NO_ACK);
I2C_setFIFOInterruptLevel(I2CA_BASE, I2C_FIFO_TXEMPTY, I2C_FIFO_RX2);
I2C_enableInterrupt(I2CA_BASE, I2C_INT_ADDR_SLAVE | I2C_INT_ARB_LOST | I2C_INT_NO_ACK | I2C_INT_STOP_CONDITION);
I2C_setEmulationMode(I2CA_BASE, I2C_EMULATION_FREE_RUN);
I2C_enableModule(I2CA_BASE);
}
void initializeBuff(void)
{
uint16_t i;
for(i=0;i<MAX_BUFFER_SIZE;i++)
{
TX_MsgBuffer[i] = 0;
RX_MsgBuffer[i] = 0;
}
}