



Other Parts Discussed in Thread: BOOSTXL-3PHGANINV
What is the recommendation for anti-aliasing filters on the analog inputs for the measured motor current? I am not able to find information on the required amount of attenuation and the eval board examples don't seem to have much of any filtering on these lines.
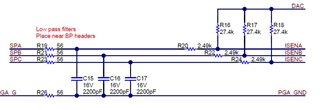
For example, the BOOSTXL-DRV8320 eval board has the following inputs for current. Is the assumption that the current will be inherently filtered by the motor windings for most applications? And since there are over current protections that use these inputs do you advise keeping the bandwidth on these channels very wide? Is there a recommended maximum bandwidth?
The BOOSTXL-3PHGANINV eval board has a similar RC filter on it's input.

Thanks.

