Part Number: TMS320F28388D
Other Parts Discussed in Thread: DP83822I, C2000WARE, TMDSCNCD28388D
Hi,
I want to implement Ethernet loopback between Laptop and TMS320F28388D.
I would like to know how to start to realize this.
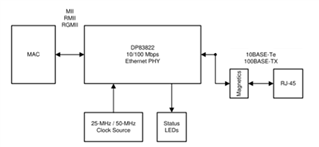
The board is ready, and the PHY device is DP83822I.
For reference, here's what I've tried so far.
1.Connect the PC and the board with LAN cable. supply power to the MS320F28388D and DP83822I.
At this time, LED_1 of PHY device is ON.
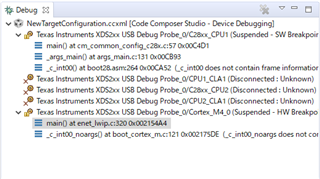
2. Load ethernet_c28x_config.out to CPU1.
3. Load ethernet_ex2_phy_loopback.out to M4.
4.Set CPU1 to Run. At this time, LED_0 of the PHY device changes from OFF to ON, and LED_1 changes from ON to OFF. laptop recognizes Ethernet.
5.Set M4 to Run. At this time, LED_0 changes from OFF to ON, and the PC no longer recognizes the Ethernet. LED_1 is still OFF.
(I don't know why the Ethernet is not recognized after running M4.)