


Part Number: TMS320F280049C-Q1
Other Parts Discussed in Thread: MOTORWARE
Hi,
I find that there is some difference between motorware and motorControlSDK with angle delay compensation function.
In motorware:
_iq angleCompFactor = _IQ(1.0 + (float_t)USER_NUM_PWM_TICKS_PER_ISR_TICK * 0.5);
_iq angleDeltaComp_pu = _IQmpy(angleDelta_pu,angleCompFactor);
In motorControlSDK
angleDelta_rad = userParams.angleDelayed_sf_sec * estOutputData.fm_lp_rps;
I can understand the explanation as below picture shows for motorware.
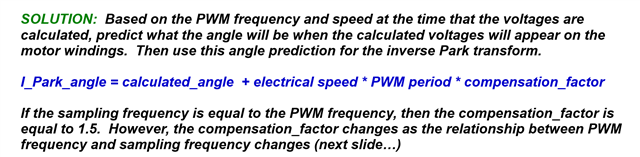

But why in motorControlSDK,changing the angle delay compensation by neglecting the 1.0 PWM period?
Regards
Arrow
Regards
Arrow
