Other Parts Discussed in Thread: DRV8353
I'm cross posting this from the Motor drivers forum as this could be InstaSPIN related:
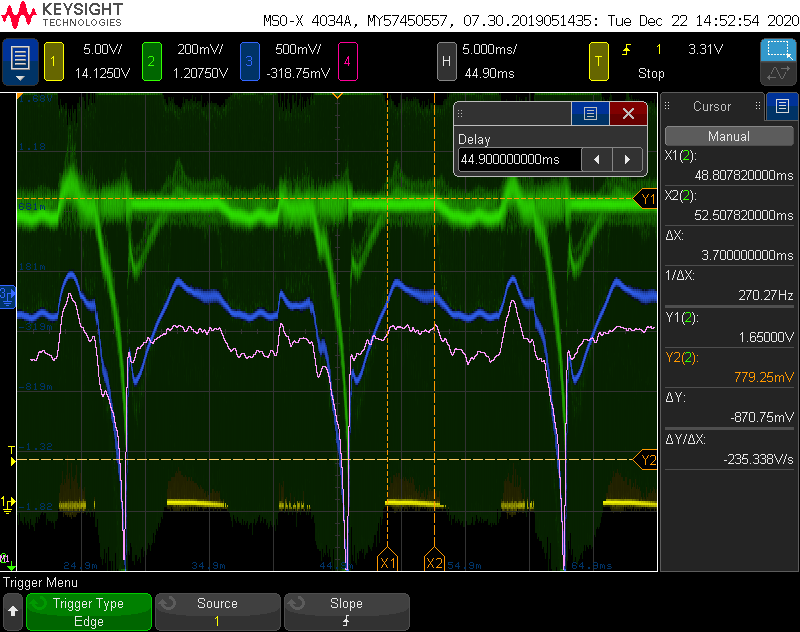
We are working on debugging the first revision of our own custom hardware. We have largely copied the DRV8353RS-EVM (same values for current filter, voltage sense filter, VCP cap, CPH/CPL caps). We are seeing an issue where when the motor RPM gets to around 90% of the Max motor RPM for a given voltage (happens at any voltage from 24V-45V VM), we start to get chattering in the motor and start to lose control. If I increase the voltage on the power supply a few volts, the chattering goes away. The FET gates all look good up to and beyond this point. The charge pump voltage also looks good.
Layout is done on a 6 layers with nearly all feedback signals running perpendicular to high current paths and generally sandwiched between stitched ground layers. DRV8353 layout was copied a directly as possible from EVM. This occurs on an unloaded motor and at low currents. If I run the same code on the DRV8353RS-EVM and replace the stock 7 mOhm resistors with 1.5 mOhm, we don't see this problem occur. I am curious if anyone else has seen this type of issue or has any ideas for next steps in terms of troubleshooting.
Rshunt = 2x 3mOhm in parallel (1.5 mOhm) @ 20 gain (USER_ADC_FULL_SCALE_CURRENT_A=110A)
FETs = 2x IAUT300N10S5N015ATMA1 (330 nC total Qg with 2 in parallel)
Idrive (HS/LS) Source = 1000mA
Idrive (HS/LS) Sink = 1800mA
USER_PWM_FREQ_kHz = 20 kHz
USER_NUM_PWM_TICKS_PER_ISR_TICK = 1
USER_NUM_CTRL_TICKS_PER_SPEED_TICK = 20
USER_NUM_CTRL_TICKS_PER_TRAJ_TICK = 20
Motor L = 280 uH
Motor R = 0.2 mOhm
Motor Pole = 3 pole pair