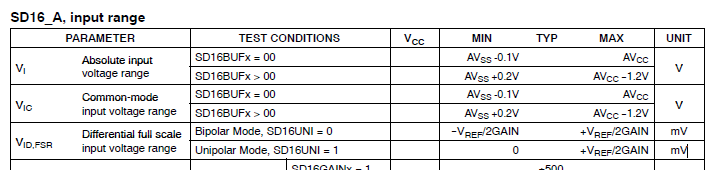
I'm measuring low-millivolt, low-frequency signals from two air-coil sensors using the SD16 ADC: gain of two, Fm = 1,048,576 Hz, 0SR = 128.
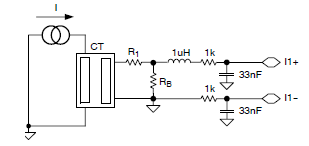
When connected differentially, with the coil returns grounded, the rms noise is about 2 ADC counts. Unfortunately, I need to measure the coils separately. When I configure channels 0 and 1 single-ended, with A- grounded, the noise increases dramatically, to 8-10 rms counts.
IF, rather than grounding A-, I connect the coil return to A- and ground A- through a ~1K resistor, the noise drops back to around 2 rms counts.
The 1K to ground degrades the anti-aliasing inputs, larger values would be better.
WHY does the SD16 hate grounded inputs, and WHAT is an appropriate range, if any, for the pseudo-ground resistor?