


Other Parts Discussed in Thread: MSP430I2040, EVM430-I2040S
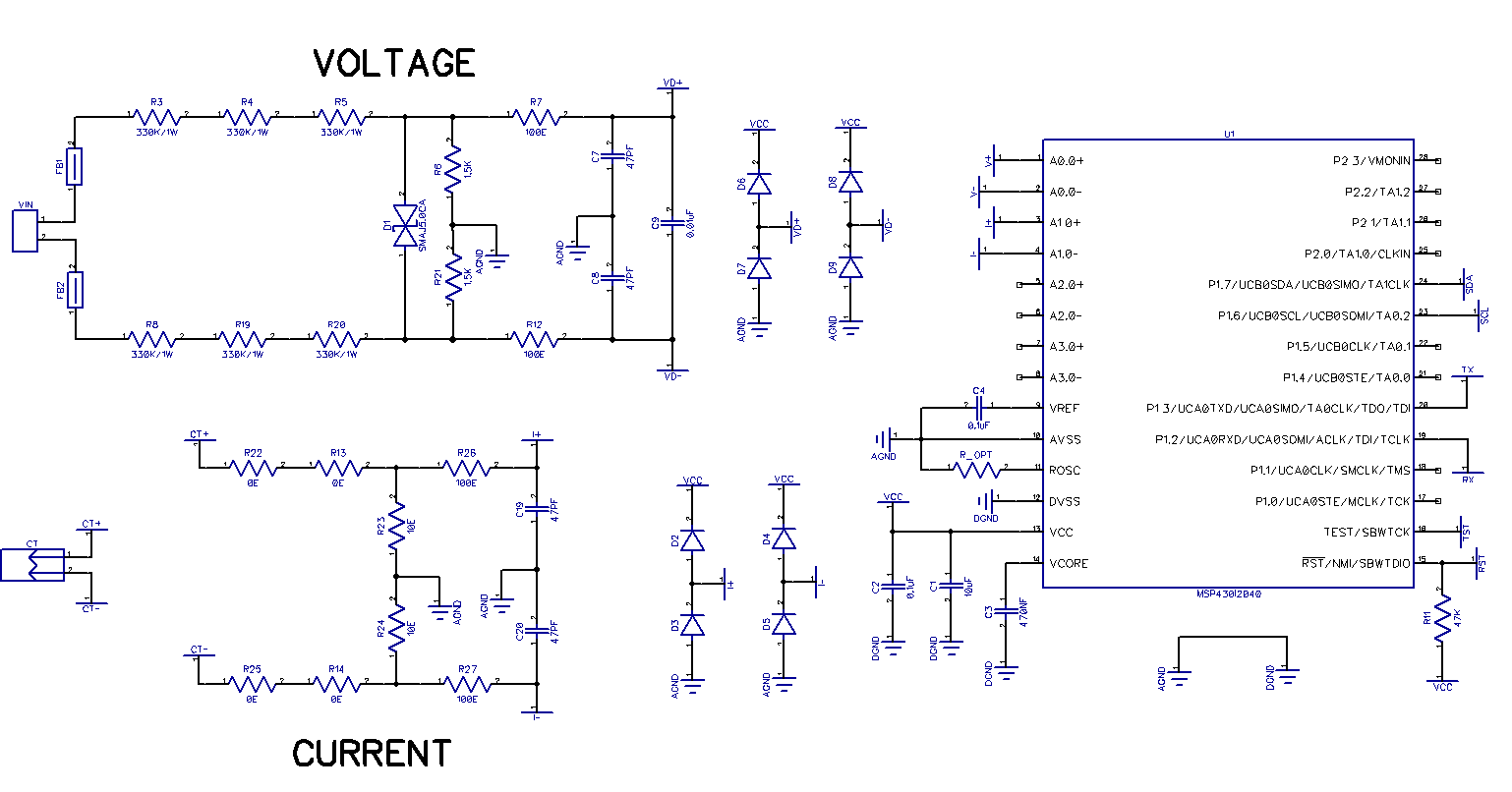
I have started working with MSP430I2040 recently. I tried to measure from 0vdc to 20vdc signal from a DC source, but the values i got are very random. I measured voltage at the ADC pins with multi-meter and it is dividing exactly as we calculated, but i am not able to find out where the problem is. Below is the circuit, Please let me know if there is anything wrong with the circuit.
Regards,
Varaprasad.

