Part Number: LDC1041EVM
Other Parts Discussed in Thread: LDC1041
Tool/software: Code Composer Studio
Hi,
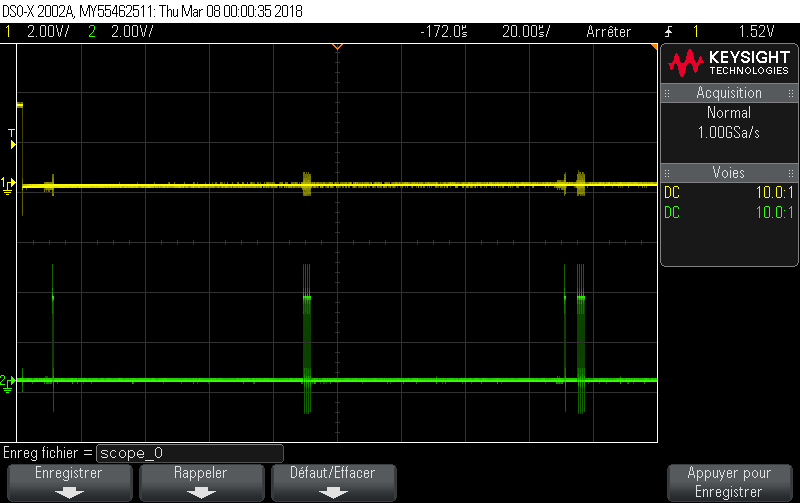
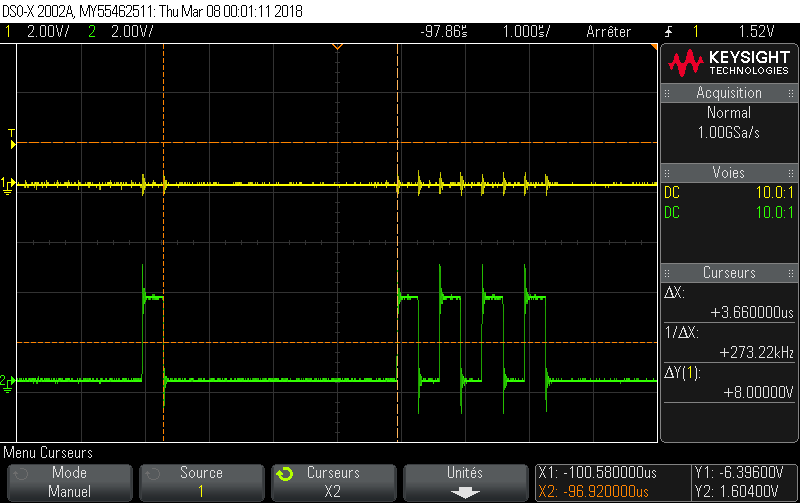
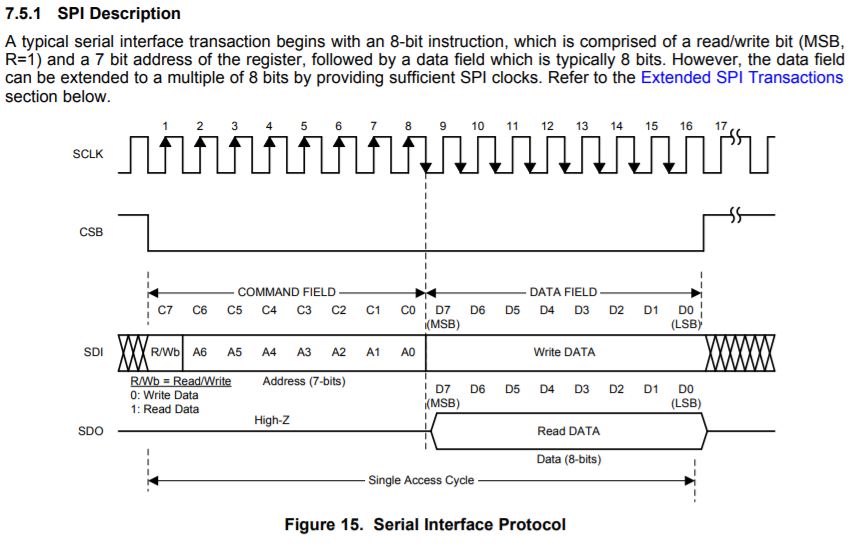
I'm trying to use the LDC1041EVM with a MSP432P401R in register level. I'm facing an issue : I'm trying first just to get the ID of the device (0x84 by defaut). In order to do that, I'm sending 0x80 toward the LDC1041, which corresponds to the code for reading and then the address of the register. I can check on the scope that my asking is right, but I don't have any answer from the LDC1041.
I've tried to program a CSB but it goes down to early : could it be the reason of the problem? Couldn't it just be at the ground at any time?
Another idea is that I don't give any frequency to the LDC1041 on the TBCLK pin, as for the moment I only want the ID. Does the device absolutely needs the frequency in order to work?
Thank you in advance
S.D.