Other Parts Discussed in Thread: UNIFLASH, MSP-FET, CC1120
Hi,
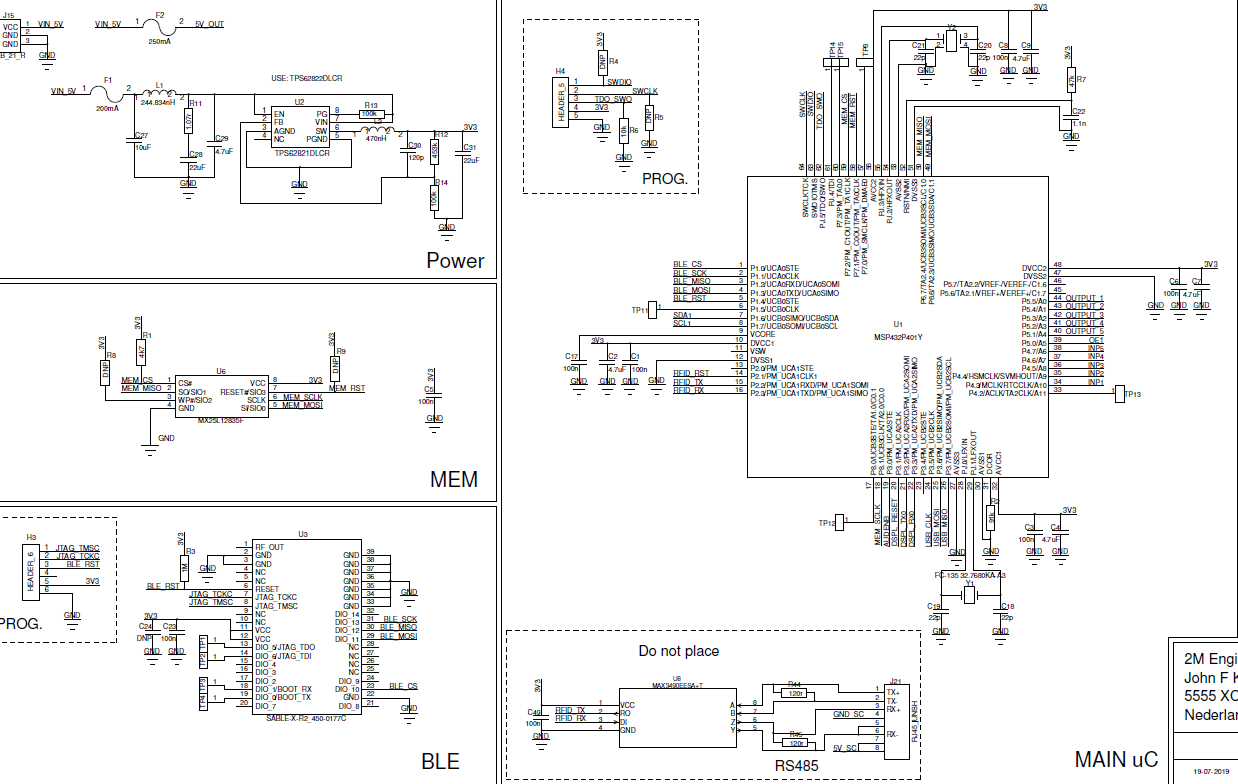
we have no trouble in flashing the MSP-EXP432P4111 (SWD), but we do have problems with lashing our custom board with the MSP432P4011. With six pcb's flashing succeed the first time, and the first time only. We populated 1 pcb(see picture) with the minimal component including the MSP432P4011RGC. Also this one succeeded only once! The pcb is 2-layers(top-bottom) and programming is done using SWD! What could be the cause?? UniFlash doen't recognize the chip AFTER the first time! No code is in the software to 'lock' the chip! Also a bit confusing is, the manual states pull-up and pulll-down for these pins but the MSP-EXP432P4111 seems to have none?
Please advise? Is this a software issue or a hardware issue(2-layers insteaad of 4-layers)
Can we chip-erase some way, and retry flashing?