Tool/software: Code Composer Studio
Hello,
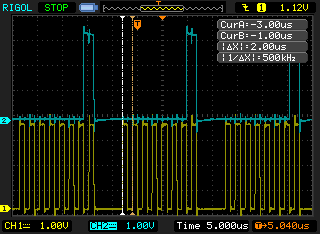
I am trying to build a SPI connection between the MSP432P401R-Launchpad (Master) and the F28069M-Launchpad (Slave).
The F28069M code works because I used it with the F28379D as Master.
I just want to send a message (sdata = 1).
I don't know if the SPI Master Config is correct.
And is my data transmit correct?
/* DriverLib Includes */
#include <ti/devices/msp432p4xx/driverlib/driverlib.h>
/* Standard Includes */
#include <stdint.h>
#include <stdbool.h>
/* Statics */
static volatile uint8_t RXData = 0;
static uint8_t TXData = 0;
//![Simple SPI Config]
/* SPI Master Configuration Parameter */
const eUSCI_SPI_MasterConfig spiMasterConfig =
{
EUSCI_B_SPI_CLOCKSOURCE_SMCLK, // SMCLK Clock Source
3000000, // SMCLK = DCO = 3MHZ
500000, // SPICLK = 500khz
EUSCI_B_SPI_MSB_FIRST, // MSB First
EUSCI_B_SPI_PHASE_DATA_CHANGED_ONFIRST_CAPTURED_ON_NEXT, // Phase
EUSCI_B_SPI_CLOCKPOLARITY_INACTIVITY_LOW, // High polarity
EUSCI_B_SPI_3PIN // 3Wire SPI Mode
};
//![Simple SPI Config]
int main(void)
{
/* Halting WDT */
WDT_A_holdTimer();
//![Simple SPI Example]
/* Selecting P1.5 P1.6 and P1.7 in SPI mode */
GPIO_setAsPeripheralModuleFunctionInputPin(GPIO_PORT_P1,
GPIO_PIN5 | GPIO_PIN6 | GPIO_PIN7, GPIO_PRIMARY_MODULE_FUNCTION);
/* Configuring SPI in 3wire master mode */
SPI_initMaster(EUSCI_B0_BASE, &spiMasterConfig);
/* Enable SPI module */
SPI_enableModule(EUSCI_B0_BASE);
TXData = 0x01;
while(1)
{
/* Transmitting data to slave */
SPI_transmitData(EUSCI_B0_BASE, TXData);
EUSCI_B0->IE &= ~EUSCI_B__TXIE;
}
}
and adapted the Baudrate and the Bitword in the F28069M example:
//
// spi_init -
//
void spi_init()
{
SpibRegs.SPICTL.bit.MASTER_SLAVE = 0;
SpibRegs.SPICTL.bit.TALK = 0; //Receiver mode enabled
SpibRegs.SPICTL.bit.CLK_PHASE = 0;
SpibRegs.SPICTL.bit.SPIINTENA = 1;
// Set reset low before configuration changes
// Clock polarity (0 == rising, 1 == falling)
// 16-bit character
// Enable loop-back
SpibRegs.SPICCR.bit.SPISWRESET = 1;
SpibRegs.SPICCR.bit.CLKPOLARITY = 0;
SpibRegs.SPICCR.bit.SPICHAR = (8-1);
SpibRegs.SPICCR.bit.SPILBK = 0;
SpibRegs.SPIBRR =0x007A;
SpibRegs.SPIPRI.bit.FREE = 1; // Set so breakpoints don't disturb
}