I am creating four 4 sensor touch faders on a board and have come accross an issue which doesnt seem to be covered in the documentation.
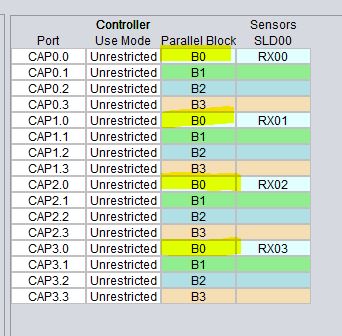
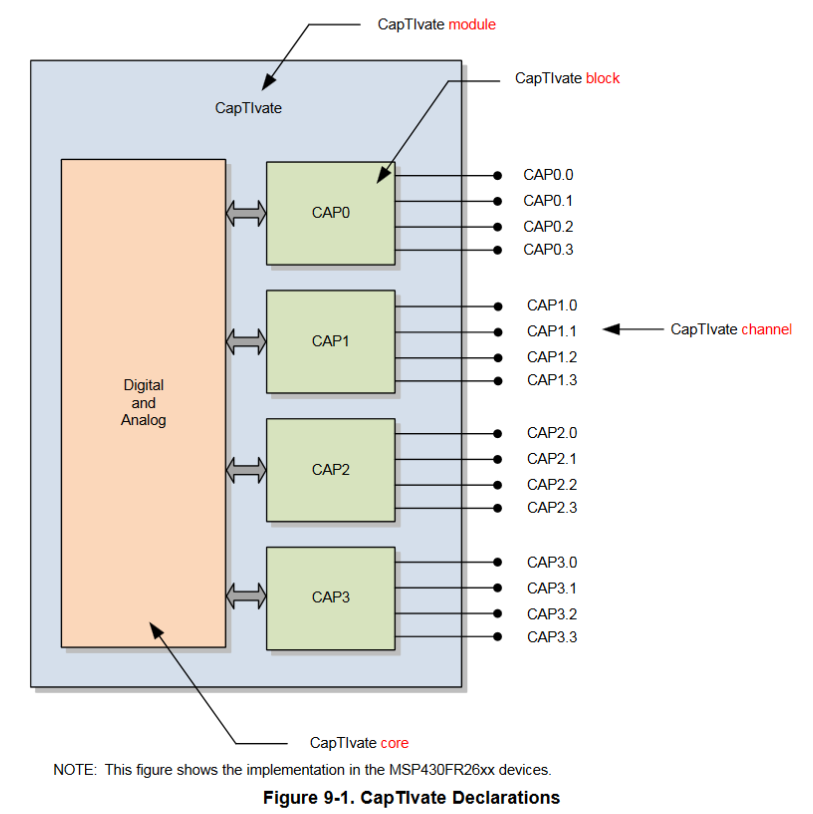
How do you connect the sensors to the ports i.e. if you have a 4 sensor fader ...do you connect to a single block (i.e. 1.0, 1.1, 1.2, 1.3) or accross blocks (i.e. 1.0, 2.0, 3.0, 4.0) or even "does it matter"
I just cant find anything that covers this, I know its simple but I still need to get it right. Any pointers to the documentation would be great
Thanks