Part Number: TMS570LS1224
Other Parts Discussed in Thread: HALCOGEN
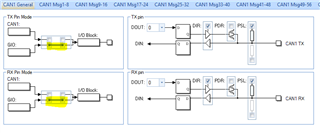
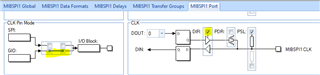
I wanted to know to configure the mibSPI / CAN pins pins as GPIO ( Input/ output) in CCS. What I need to configure in Halcogen ?
CAN1TX as' Input pin' ( GIO)
CAN1RX as' Input pin' ( GIO)
N2HET1[24]/MIBSPI1NCS[5] as' Input pin' ( GIO)
MIBSPI1NENA/N2HET1[23]/ECAP4 as 'output pin' ( GIO)
MIBSPI5SOMI[0] as' output pin' ( GIO)
MIBSPI5CLK as' Input pin' ( GIO)
Also how to make the particular pin say MIBSPI5CLK output a ' Logic High' .
Example code would be most appreciated, but I can understand if there isn't anything available. General instructions would be fine, I'll muddle through them.