Hi,
I made a CAN RX filtering function.
It works well, but when I mix it with filter disabling function, sometimes the filtering fails.
I have an interrupt service routine, so my tm4c1290nczad controller receives the messages
with CAN ID 0x100. Usually my filter function works fine.
But, after I run these enable/disable functions in random times,
I can't see 0x100 messages even after running the enable function
or I can see 0x100 messages even after running the disable function.
When I commented the disable function and run the only enable function multiple times,
I've never seen this type of error.
Do you have any idea?
Regards,
Young
int main()
{
...
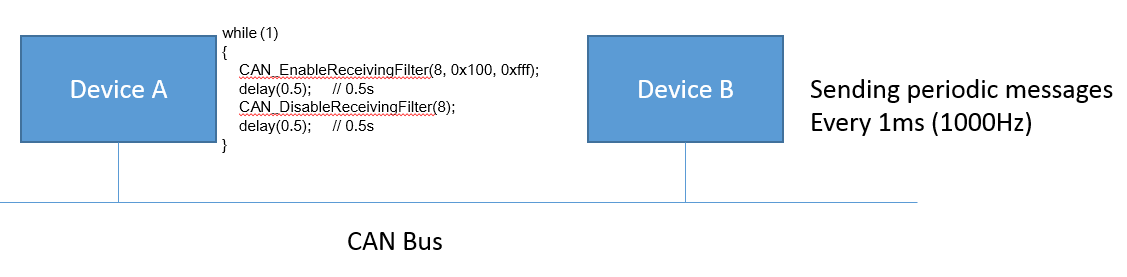
while (1)
{
CAN_EnableReceivingFilter(8, 0x100, 0xfff);
delay(0.5); // 0.5s
CAN_DisableReceivingFilter(8);
delay(0.5); // 0.5s
}
...
}
void CAN_EnableReceivingFilter(uint32_t canObjId, uint32_t msgId, uint32_t msgIdMask)
{
tCANMsgObject msgObj;
msgObj.ui32MsgID = msgId;
msgObj.ui32MsgIDMask = msgIdMask;
msgObj.ui32Flags = MSG_OBJ_RX_INT_ENABLE | MSG_OBJ_USE_ID_FILTER;
CANMessageSet(CAN_BASE, canObjId, &msgObj, MSG_OBJ_TYPE_RX);
}
void CAN_DisableReceivingFilter(uint32_t canObjId)
{
tCANMsgObject msgObj;
msgObj.ui32MsgID = 0xfff;
msgObj.ui32MsgIDMask = 0xfff;
msgObj.ui32Flags = 0;
CANMessageSet(CAN_BASE, canObjId, &msgObj, MSG_OBJ_TYPE_RX);
}