Tool/software: Code Composer Studio
Hi all,
I am working CAN module. Previously I created thread regarding CAN module issue: 
This issue was resolved and I was getting proper CAN frame at output.
Further I added ADC code. After this modification my code was working and CAN frames coming out at PB1.
Code is as follows
#include <stdint.h>
#include <stdbool.h>
#include "inc/hw_memmap.h"
#include "inc/hw_types.h"
#include "inc/hw_can.h"
#include "inc/hw_ints.h"
#include "driverlib/debug.h"
#include "driverlib/sysctl.h"
#include "driverlib/gpio.h"
#include "driverlib/adc.h"
#include "driverlib/can.h"
#include "driverlib/interrupt.h"
#include "driverlib/pin_map.h"
#include "driverlib/sysctl.h"
uint32_t ui32ACCValues1=0;
uint32_t ui32ACCavg1;
uint8_t Count=0;
uint32_t ui32SysClock=0;
volatile bool g_bErrFlag = 0;
volatile bool g_bTXFlag = 0;
void SimpleDelay(void)
{
SysCtlDelay(40000);
}
void CANIntHandler(void)
{
uint32_t ui32Status;
ui32Status = CANIntStatus(CAN0_BASE, CAN_INT_STS_CAUSE);
if(ui32Status == CAN_INT_INTID_STATUS)
{
ui32Status = CANStatusGet(CAN0_BASE, CAN_STS_CONTROL);
g_bErrFlag = 1;
}
else if(ui32Status == 1)
{
CANIntClear(CAN0_BASE, 1);
CANMessageClear(CAN0_BASE, 1);
g_bErrFlag = 0;
g_bTXFlag = 1;
}
else
{
}
}
int main(void)
{
uint32_t ui32MsgData=0;
uint8_t *pui8MsgData;
pui8MsgData = (uint8_t *)&ui32MsgData;
tCANMsgObject sCANMessage;
sCANMessage.ui32MsgID = 1;
sCANMessage.ui32MsgIDMask = 0;
sCANMessage.ui32Flags = MSG_OBJ_TX_INT_ENABLE;
sCANMessage.ui32MsgLen = sizeof(pui8MsgData);
sCANMessage.pui8MsgData = pui8MsgData;
ui32SysClock = SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ | SYSCTL_OSC_MAIN | SYSCTL_USE_PLL | SYSCTL_CFG_VCO_480), 120000000);
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD);
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
SimpleDelay();
GPIOPinConfigure(GPIO_PA0_CAN0RX);
GPIOPinConfigure(GPIO_PA1_CAN0TX);
GPIOPinTypeCAN(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
SysCtlPeripheralEnable(SYSCTL_PERIPH_ADC1);
SysCtlPeripheralEnable(SYSCTL_PERIPH_CAN0);
GPIOPinTypeADC(GPIO_PORTD_BASE, GPIO_PIN_5); //PD5-CH6-Temperature
ADCClockConfigSet(ADC1_BASE, ADC_CLOCK_SRC_PLL | ADC_CLOCK_RATE_FULL,15);
ADCSequenceConfigure(ADC1_BASE, 3, ADC_TRIGGER_ALWAYS, 0);
ADCSequenceStepConfigure(ADC1_BASE, 3, 0, ADC_CTL_CH6|ADC_CTL_IE|ADC_CTL_END); //REV.Pow
CANInit(CAN0_BASE);SimpleDelay();
CANBitRateSet(CAN0_BASE, 120000000, 1000000);SimpleDelay();
ADCSequenceEnable(ADC1_BASE, 3);
ADCIntClear(ADC1_BASE, 3);
CANIntRegister(CAN0_BASE, CANIntHandler);SimpleDelay();
CANIntEnable(CAN0_BASE, CAN_INT_MASTER | CAN_INT_ERROR | CAN_INT_STATUS);SimpleDelay();
IntEnable(INT_CAN0);SimpleDelay();
CANEnable(CAN0_BASE);SimpleDelay();
Count=0;
ui32ACCavg1=0;
g_bTXFlag=1;
while(1)
{
while(g_bTXFlag)
{
g_bTXFlag=0;
Count=0;
while(Count<10)
{
while(!ADCIntStatus(ADC1_BASE, 3, false))
{
}
ADCSequenceDataGet(ADC1_BASE, 3,&ui32ACCValues1);
ADCIntClear(ADC1_BASE, 3);
ui32ACCavg1=ui32ACCavg1+ui32ACCValues1;
Count++;
}
ui32MsgData=ui32ACCavg1/10;
CANMessageSet(CAN0_BASE, 1, &sCANMessage, MSG_OBJ_TYPE_TX);
ui32ACCavg1=0;
SimpleDelay();
}
}
}
Now same code is not working. No CAN frames are coming.
I have 4 spare board 2 in use and 2 new(box pack).
I tried to reprogram this 4 spare board with this code and simple TX code which I mention in my previous thread. Still i cant see CAN frames coming out.
PB1 pin is at 3.3V alwasys.
All boards are working as I reprogram with ADC code.I am getting proper output.
LED blinking code is alo running. I tried to toggle PB0& PB1 pin and its working fine.I got square ware at output .
From the day, CAN is not working I get error at debugging as : c_int00() at boot.asm:227 0x00000C5A(_c_int00 does not contain frame information
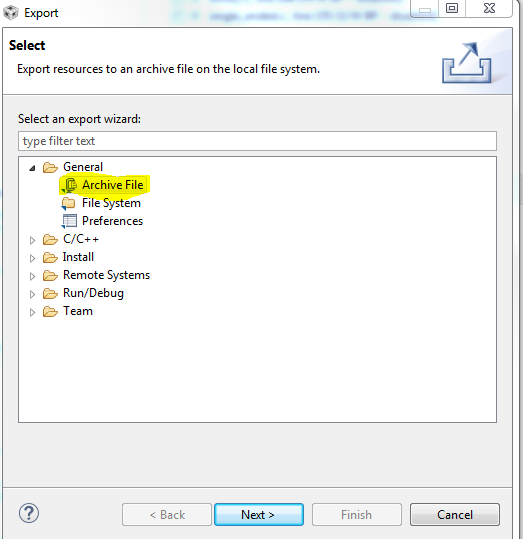
Debug error and setting in CCS are in below pics:
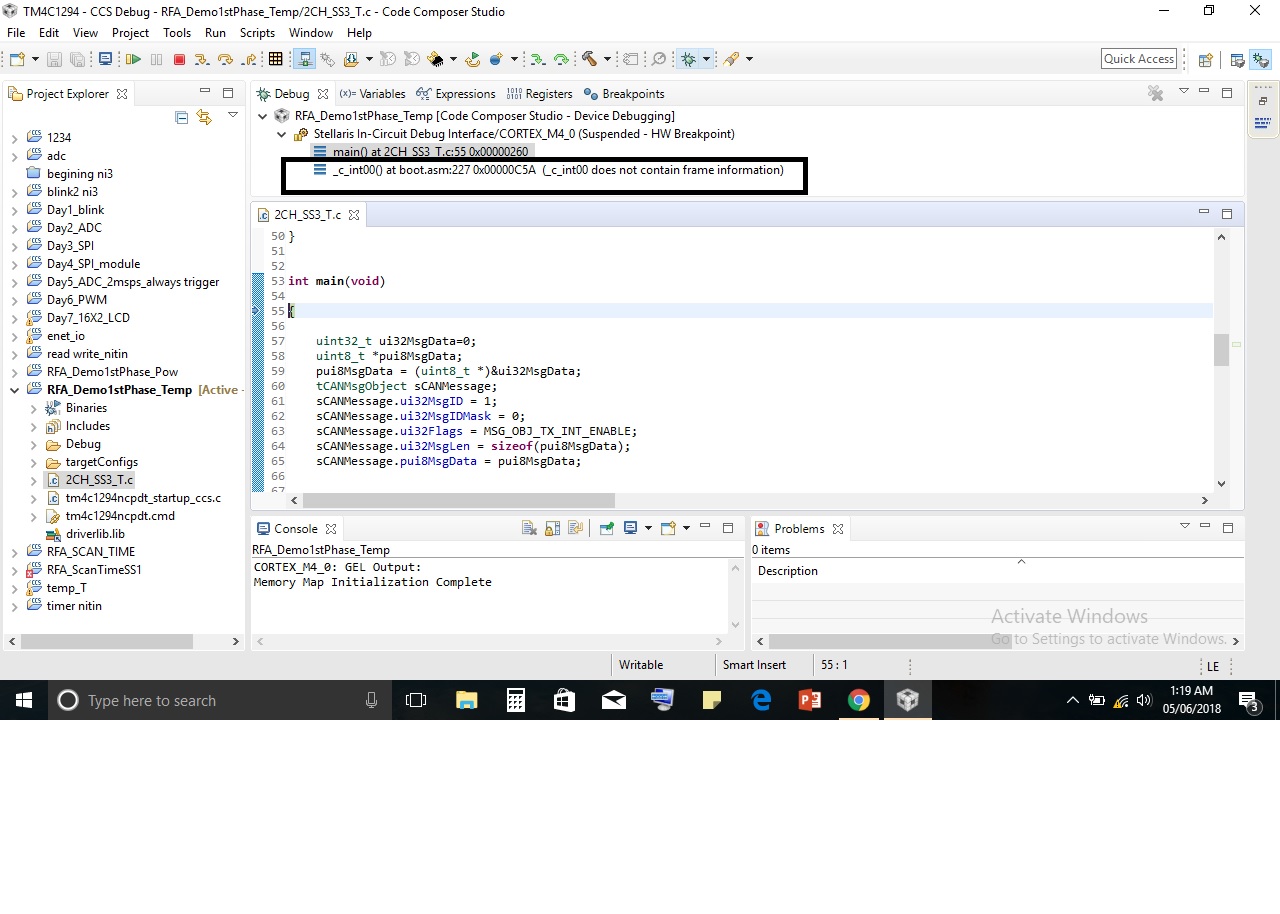
Hope this issue will resolve soon