


Other Parts Discussed in Thread: DRV10975
Hi Team,
Our customer is using DRV10987 together with Maxon motor. The motor starts to spin then suddenly stop and get too hot. Below is the specifications of the motor.

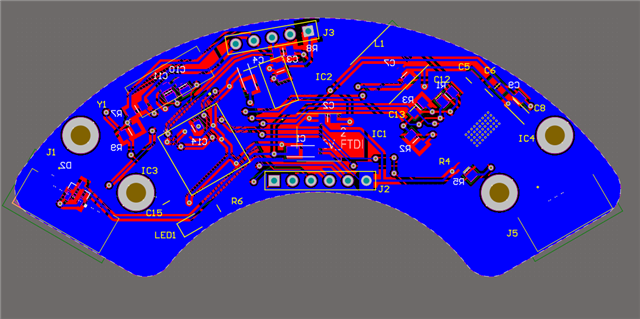
Upon checking the PCB layout, I noticed that the thermal pad has no vias to dissipate the heat from the IC to the ground plane. The customer decided to switched to DRV10975 because the DRV10987 is out of stocks then revised the board and added vias based on the layout example from the datasheet. Please see the layout of the new board below.

Attached is the schematic diagram for reference.
Do you think the layout is good enough for this application? The customer would like to confirm also if there is any mistake in the configuration registers below for Maxon motor.
Config 1: 0x1349
config2 : 0x1C3B
CONFIG3 : 0x2366
CONFIG4: 1BA7
CONFIG4: 0x1BA7
CONFIG5: 0x389B
CONFIG 6: 0xB070
CONFIG 7 : 0x0B6B
Regards,
Danilo


