Hi All.
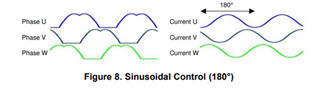
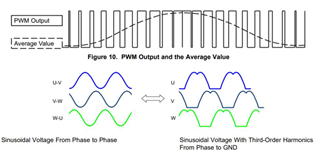
I want to use 3-PWM mode to do sinusoidal (SPWM) control for BLDC motor.
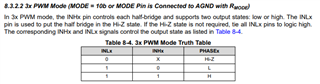
And please tell me how to control INLx and INHx PWM.
Mostly about INLx, when driving the BLDC, all the time INLx is in High level state?
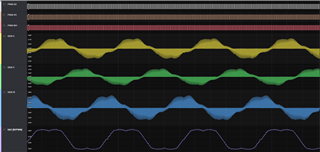
It would be helpful to have a sequence diagram of the six control signals.