Hi teams:
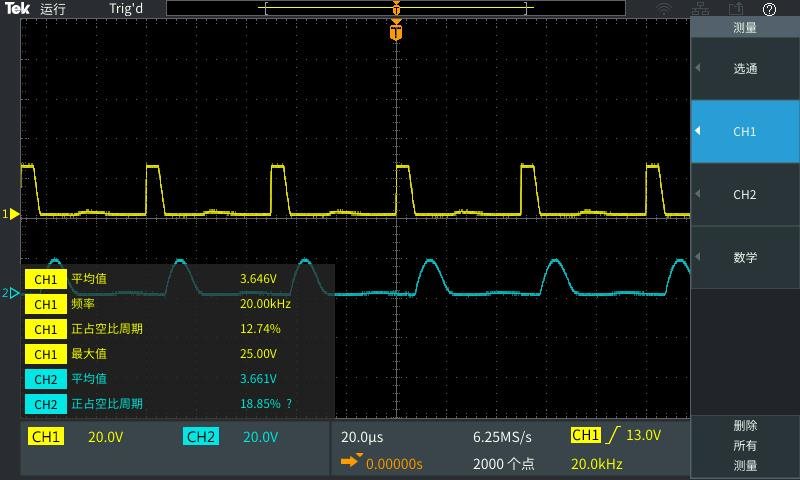
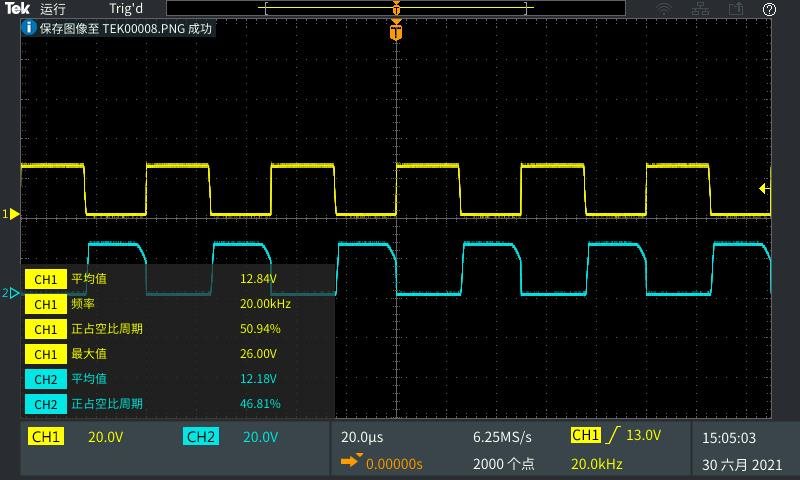
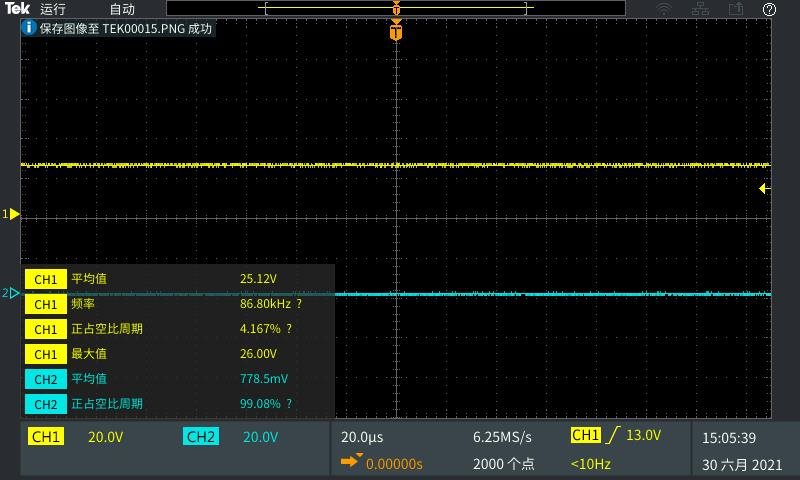
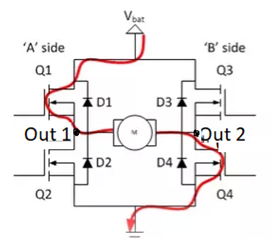
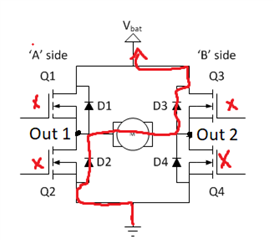
When the 8256e is set in the fast decay mode, is there any output only when the input PWM duty cycle is within 50% - 100%?
Hi teams:
When the 8256e is set in the fast decay mode, is there any output only when the input PWM duty cycle is within 50% - 100%?