Other Parts Discussed in Thread: MOTORWARE, LAUNCHXL-F280049C, BOOSTXL-DRV8320RS
I've got a Piccolo F28027F connected to a DRV3805 and I'm having trouble getting it to behave normally after coming out of standby mode. When activated, the motor whines and has very little torque after coming out of standby.
I'm initializing the EN_GATE pin with
EALLOW; GpioCtrlRegs.GPAMUX1.bit.GPIO6 = 0; // GPIO6 = GPIO6 GpioCtrlRegs.GPADIR.bit.GPIO6 = 1; // GPIO6 as output EDIS;
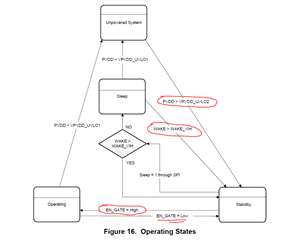
And setting it to Standby with
GpioDataRegs.GPACLEAR.bit.GPIO6 = 1; // into standby state
I can see the current usage drop on a multimeter, so it looks like it's getting into standby.
But after bringing it out of standby, is when I have problems
GpioDataRegs.GPASET.bit.GPIO6 = 1; // out of standby state
Is there something else I need to reset to exit standby? Something in the PWM control maybe? Should I be initializing/controlling the pin in a different way?