Hi,
The customer is testing using DRV8316.
The motor is not operating properly.
1) Is there any part of the environment that set wrong?
2) Please give me a guide to the minimum setting required to drive the motor.
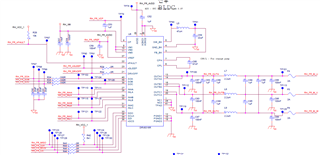
Pin Setting
- nSLEEP : HIGH (5V), DRVOFF : LOW(0V), SPI settings (STATUS registers, CONTROL registers all initialize to data bit 0)
Output Voltage By Pin
-VREF : 3.3V, SOA, SOB, SOC : 3.24V, VM1~3 : 12.2V, Cp : 17.2V, AVDD : 3.3V, FB_BK : 3.27V, CPH : 12.2V
- INHA, INHB, INHC: Input PWM values according to motor pin map
- INLA, INLB, INLC: Input GPIO values according to motor pin map (HIGH, LOW)