Other Parts Discussed in Thread: DRV8301, DRV8353, MOTORWARE
Hello,
I've replaced the DRV8301 in a fully working BLDC motor control design with DRV8353. I started walking through the instaspin labs in order to verify the design and can successfully pass lab1b which is open loop voltage control, but cannot pass the lab1c with is closed loop current control. Here are some of the parameters:
The motor has Irms of about 12Amps
System voltage: 48V
MOSFET Rds(on) = 4.7mOhm
Rshunt = 0.01Ohm
So i set the VDS_OCP to 0.2V which corresponds to about 40A max current protection
Adjusted the IdriveN to 200mA and IdriveP to 150mA according to my calculations.
I selected gain of 20V/V and set
USER_ADC_FULL_SCALE_CURRENT_A (16.5) because the range of the measured current is -8.25A to 8.25A
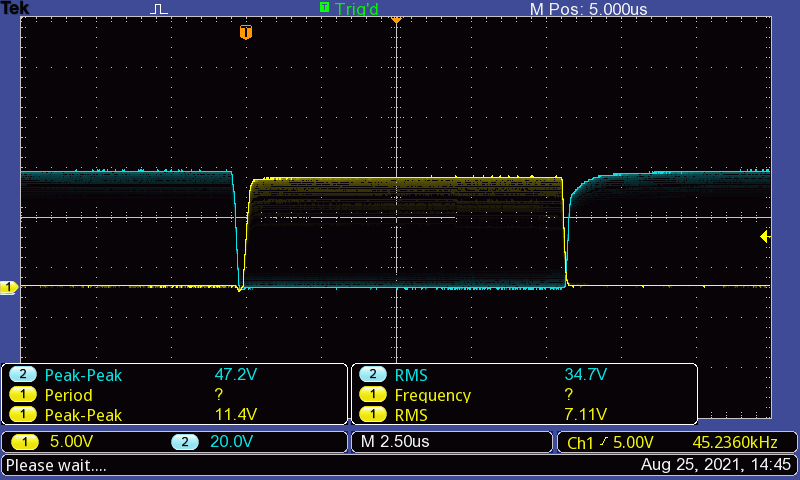
However, when I run the project - the OCP protection trip in the beginning of the process.
I'm seeking for advice on what could be wrong here. Calculation or else. By knowing that I have internal OCP protection I experimented with the values and gain and managed to run the lab, but nothing close to the calculations.