Other Parts Discussed in Thread: DRV8301, DRV8353, MOTORWARE, CSD18533Q5A
Hello,
I swapped DRV8301 with DRV8353 on a already working design but I obviously have issues with the gate drive control.
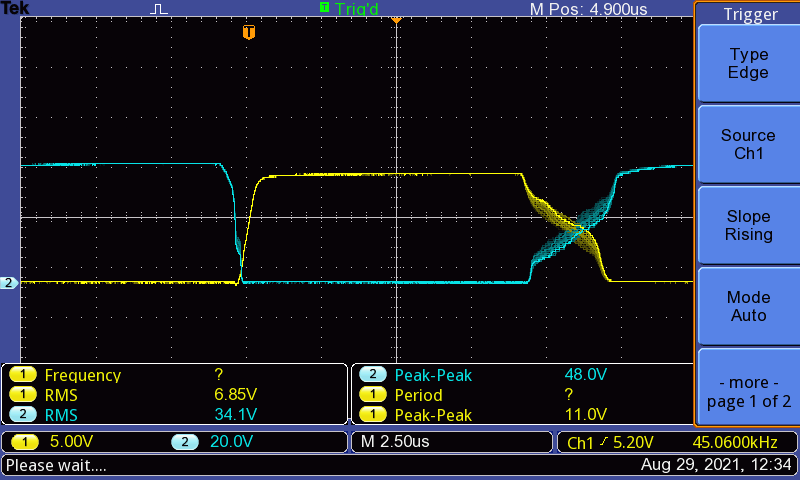
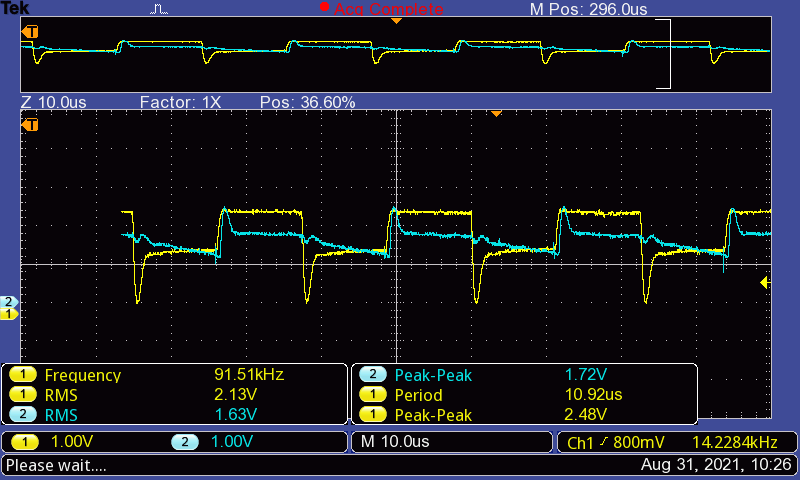
I run motorware lab 1c which is for closed loop current control and this is what I see on the scope:
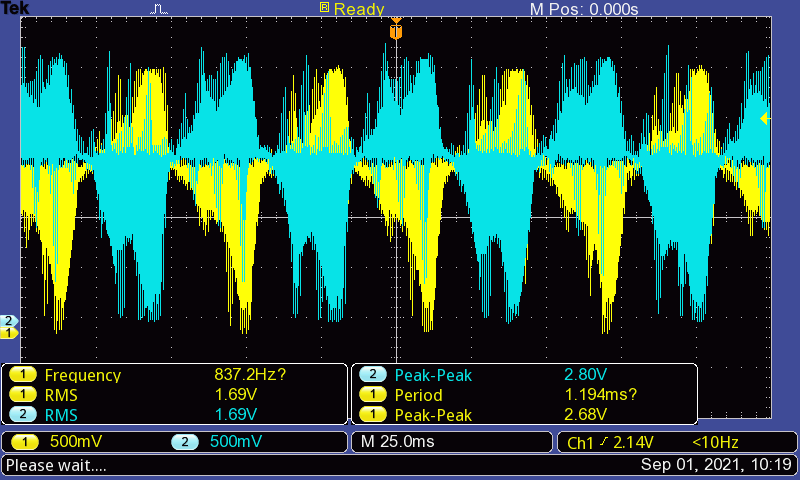
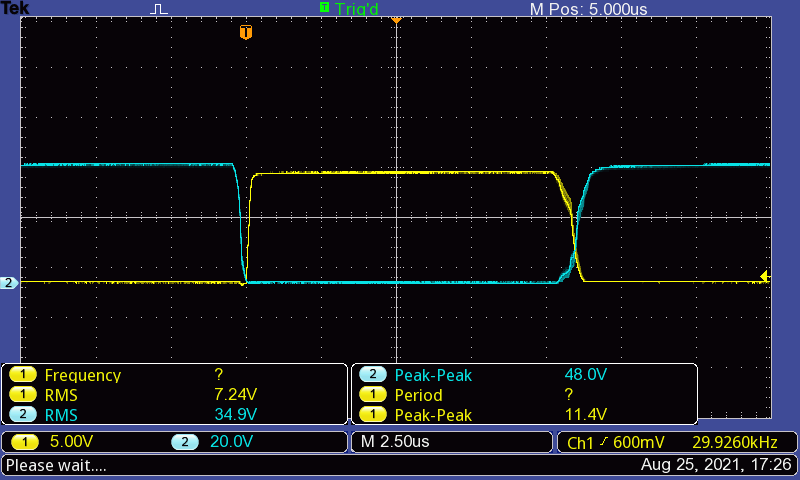
0 Amps applied (Iqref_A parameter)
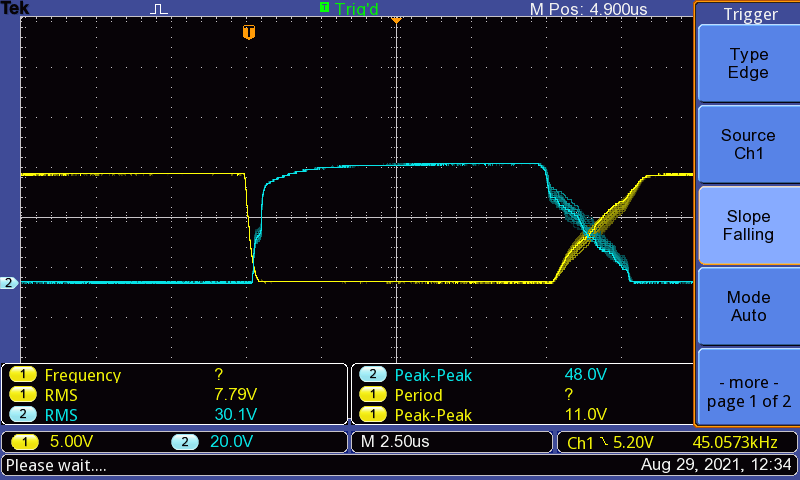
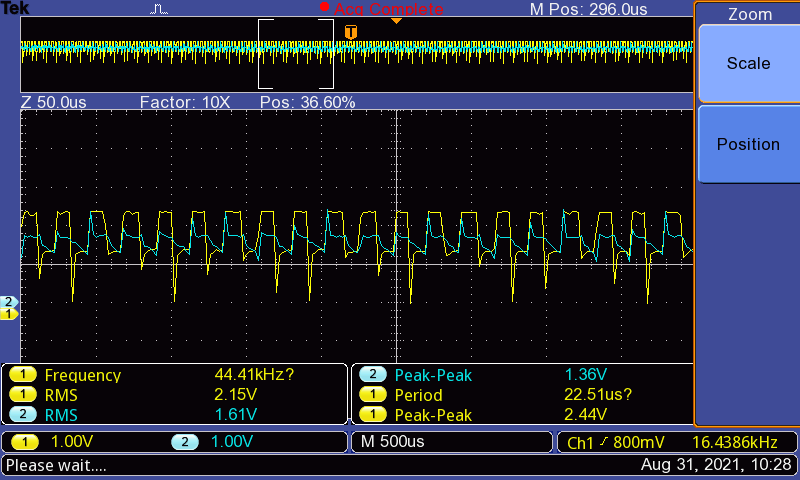
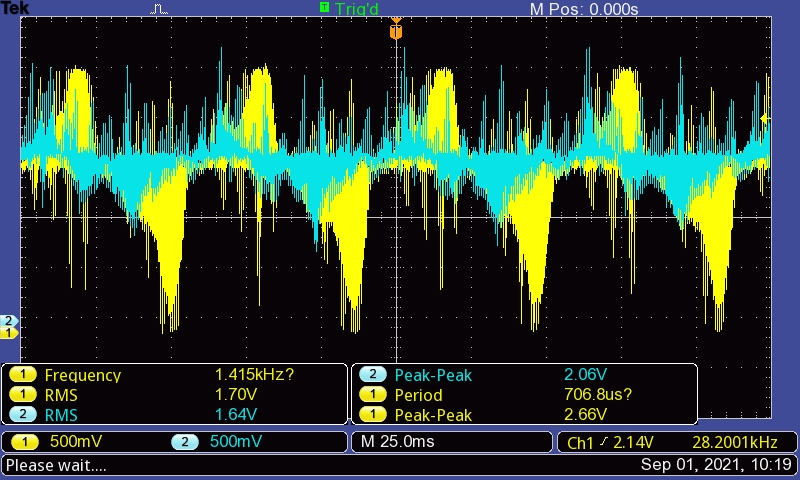
0.5 Amps applied
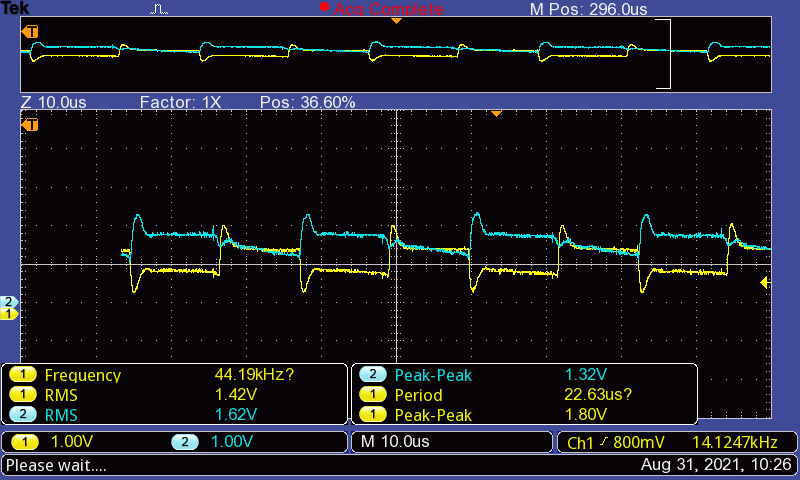
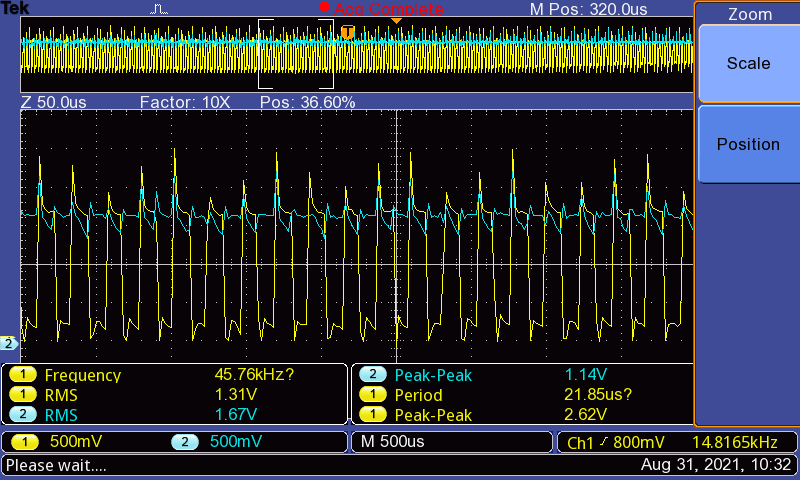
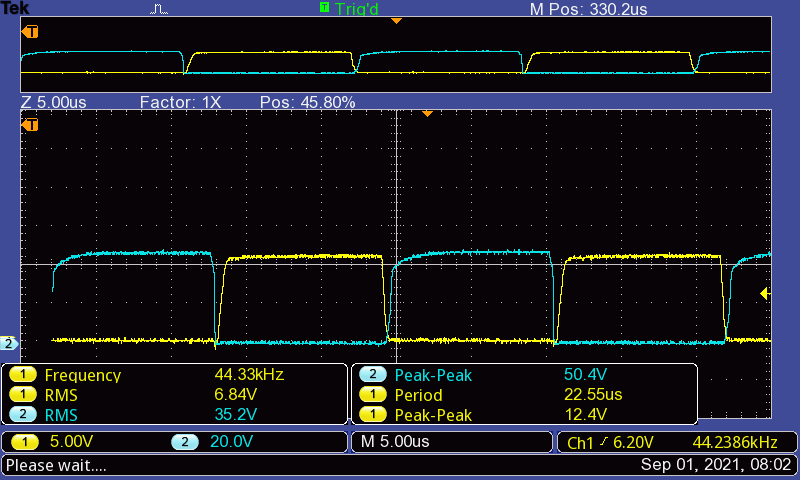
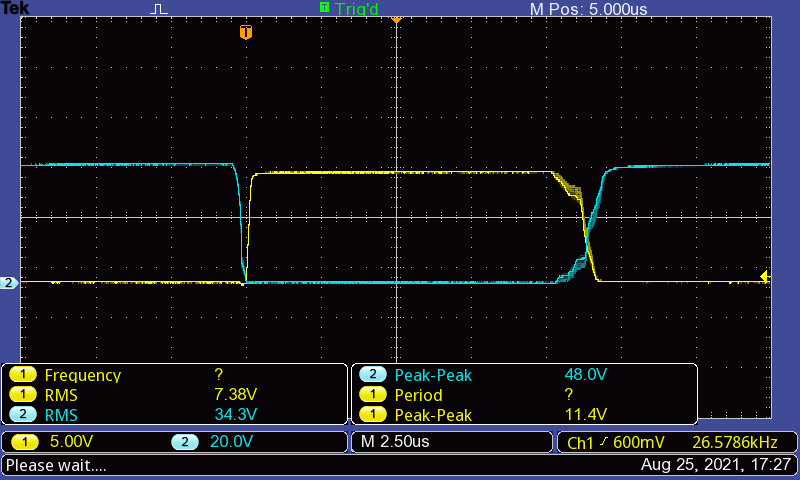
1.0 Amps applied
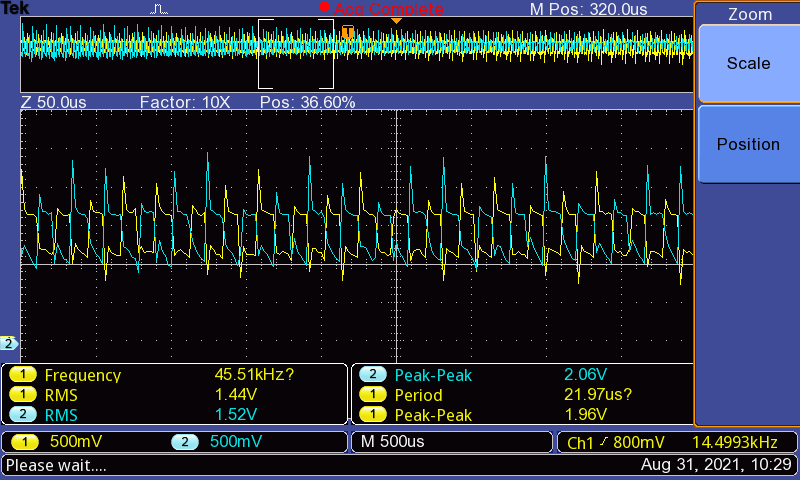
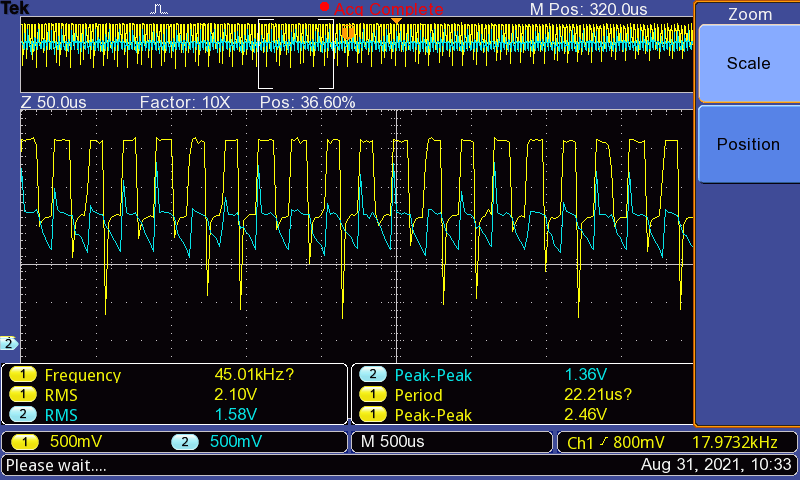
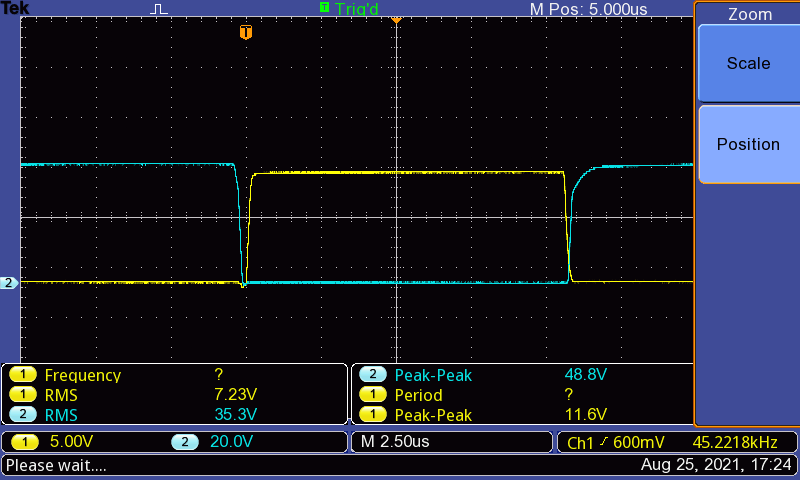
2.0 Amps applied
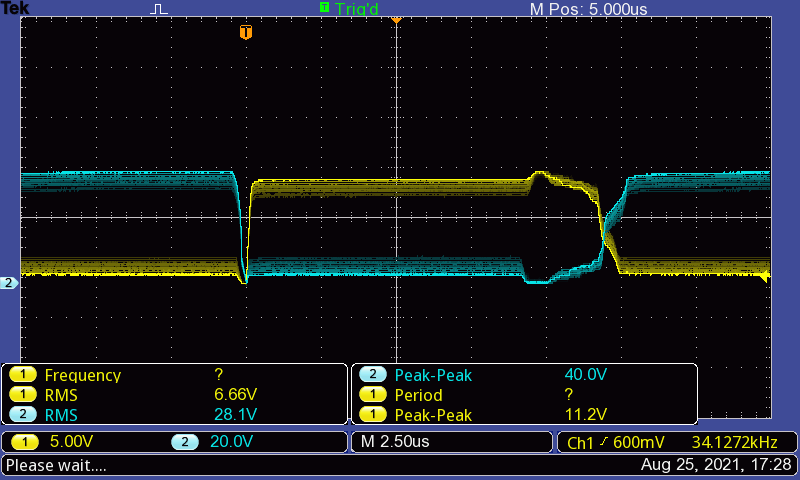
So the scope gave me the finger 
If I put more current, the OCP protection cuts out the driver.
Please advice on what could be wrong in this situation. In the previous design I have a gate resistor because the previous driver didn't had slew rate control. Here I'm using the following settings:
IdriveN: 200mA and IdriveP: 150mA