Other Parts Discussed in Thread: DRV8210, DRV8833, DRV8220
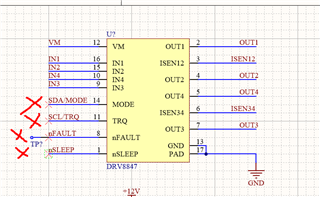
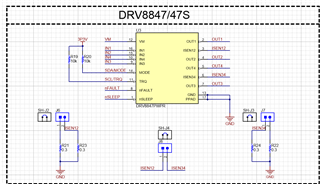
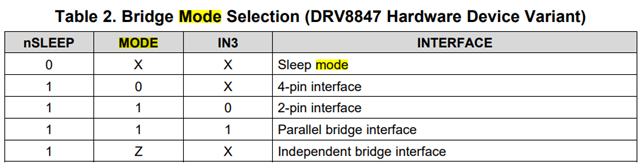
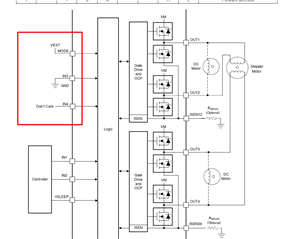
Hi, I followed the EVM design. I have the following questions if you can reply. 1: In the EVM, a 300mOHM resistor is used to control current. If the shunt will install then both 300mOHM resistors will be in parallel otherwise, a single 300mOHM will be used. Now, what will be the current for 300mOHM(0.5A) and 150mOHM(1A) because I didn't understand the current setting formula i.e. Itrip = (Torque X Vtrip)/ Rsens 2: Can I use DRV8847 in the same configuration as DRV883? Like only IN1 to IN4 pins use as input and not connected to all other inputs pins as shown in the attached picture. Thanks