Other Parts Discussed in Thread: DRV8304
Hi team,
My customer will use DRV8316 in their system. We have two questions, can you help to check?
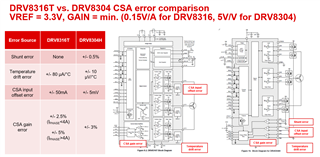
1. Do we have any test results for the noise of the internal current sensor amplifier(CSA) for each gain? How many mV?

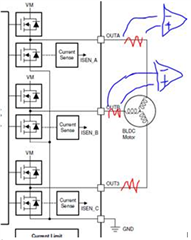
2. The peak current of Motor is 0.2mA for each phase, the output of CSA is 0.24V even we set GAIN to 1.1V/A. Is an external high side current sensor(as shown in the picture below) needed in this case?
3. Do we have any learning material to discuss the how accuracy of current sensors influences the FOC control accuracy?
B&R
Lijia