Other Parts Discussed in Thread: DRV832X, SN74LV4052A
Hi,
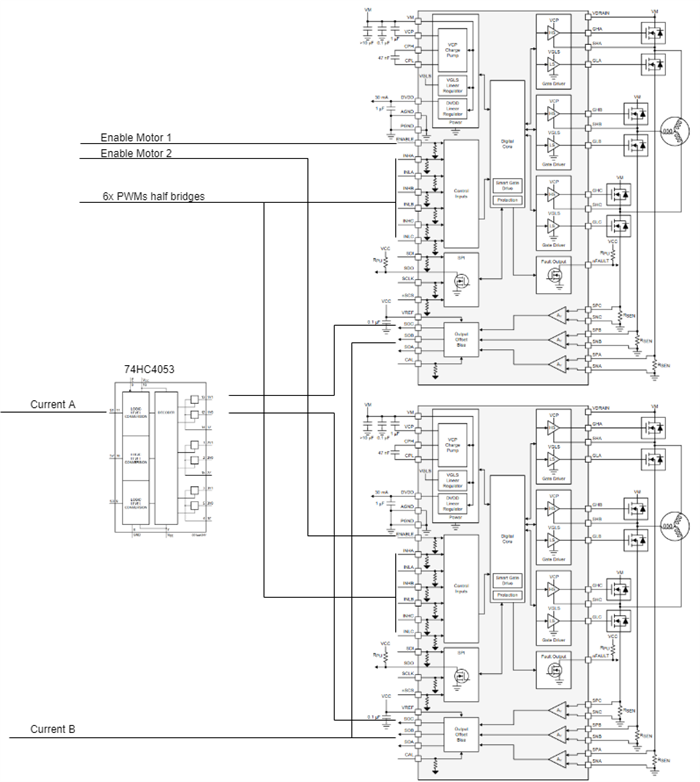
We are currently working on an application, where we would like to multiplex multiple BLDC motors. Since only one of up to 4 motors needs to run at a time we've wanted to share the control signals for all the motor drivers.
The basic idea is to use the ENABLE signal of the DRV8323S to select a gate driver. The individual half bridge control signals are shared for all gate driver ( 6x PWM connected to 4 gate drivers). SPI is used to configure the gate drivers. The hall sensor inputs will be multiplexed with an analog multiplexer (74HC4052).
Questions:
- Are there any general pitfalls we should keep an eye on, if we want to multiplex the gate drivers with the ENABLE signal?
(e.g. we will need to reconfigure the registers at every start of the motor via SPI because the loss of the ENABLE will reset all the registers)
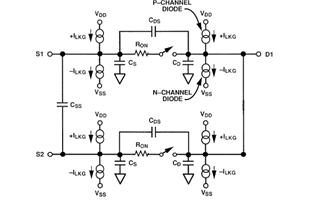
- Do we need a analog multiplexer for the current sense amplifier or are the outputs of the amplifiers on High-Z if the Enable signal is removed?
- We could multiplex the current signals like shown for current A
- If the amplifier outputs go in a high impedance state, we could connect all the current feedbacks together, like shown for current
Let me know if I can provide further information to understand the application.
Thank you for your help.