Other Parts Discussed in Thread: DRV8306
Good Morning,
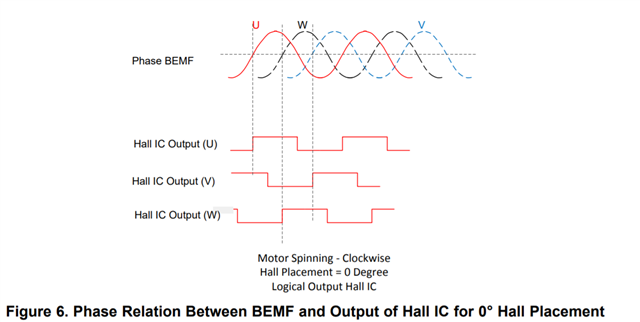
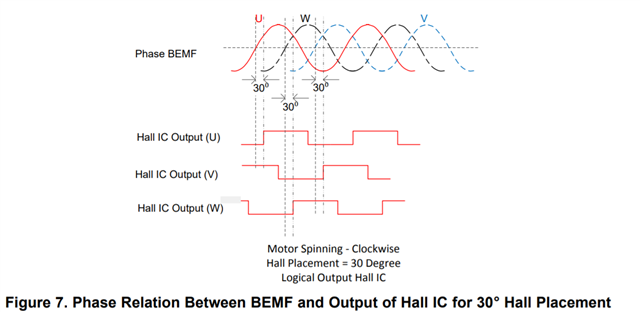
I'd like to ask some clarifications about the concept of the Hall placement (when using trapezoidal mode) concerning the DRV10970 component. I understand the difference between the 0° and 30° Hall placement, but I want to know why it is possibile to configure only 30° placement with trapezoidal mode. Inside the datasheet of the component there is a reference to trapezoidal mode 0° Hall placement (page 17, Table 2, but there is no table); moreover, at page 20, there is another reference to 0° placement (Table 4, see attached figure) but I cannot undestand the meaning of the COMMENTS section: how is it possible to configure the OTP setting for 30° Hall delay?

However, I think the trapezoidal mode with 30° Hall placement is working correctly with my motor, since I can achieve current consumptions which are consistent with the motor specs.
Nonetheless, I wish to understand better. My motor has 3 rotor pole pairs (inner rotor) and 9 stator poles (3 triplets of windings for each phase U,V,W, see attached figure). Hall sensors ICs are spaced of 40°, and they are shifted wrt the stator poles of 20° (see attached figure).


Given such angles, the concept of 0/30° Hall placement is difficult for me to understand and to be applied.
I already tested such motor with the evaluation board of your component DRV8306, and it works correctly. Which Hall placement does the DRV8306 implement for the trapezoidal commutation? 0° or 30° (I would guess 30°, same as DRV10970, since the two behaviours seem identical, but I'd like to understand better how these concepts can be applied to my specific motor and to the drivers I want to evaluate for future use inside my application).
Thank you so much! Kind regards.