Other Parts Discussed in Thread: LAUNCHXL-F280025C, DRV8305
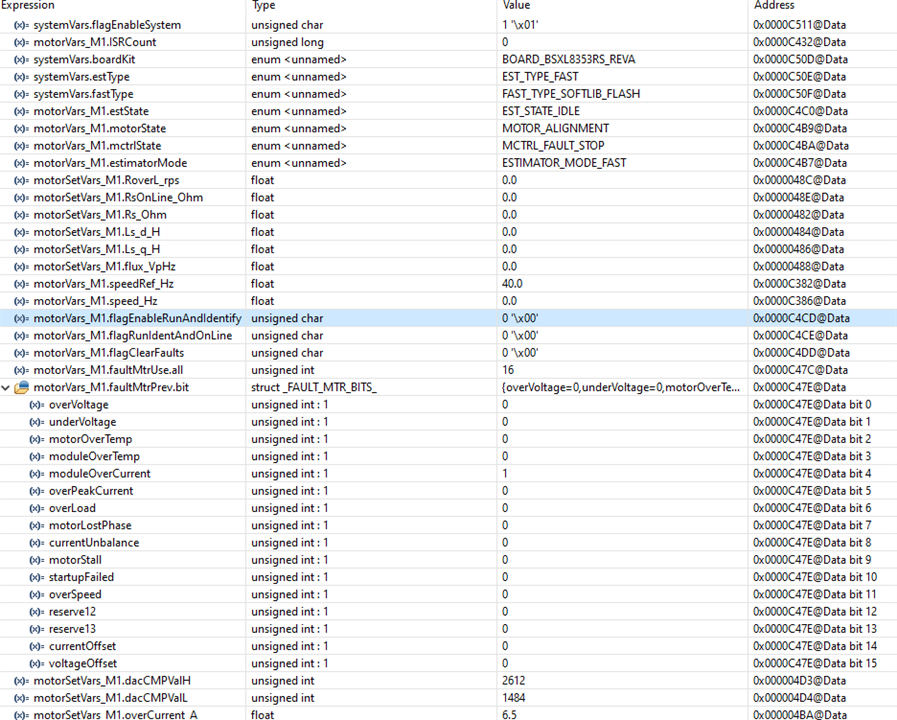
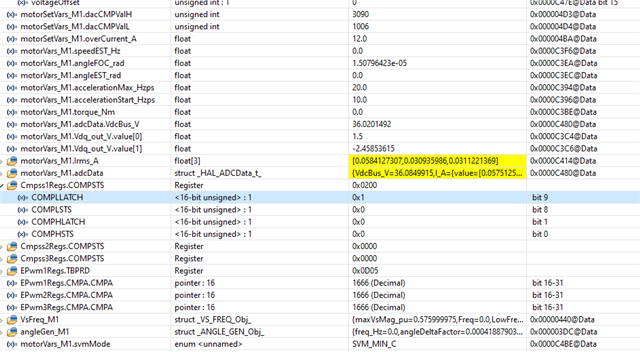
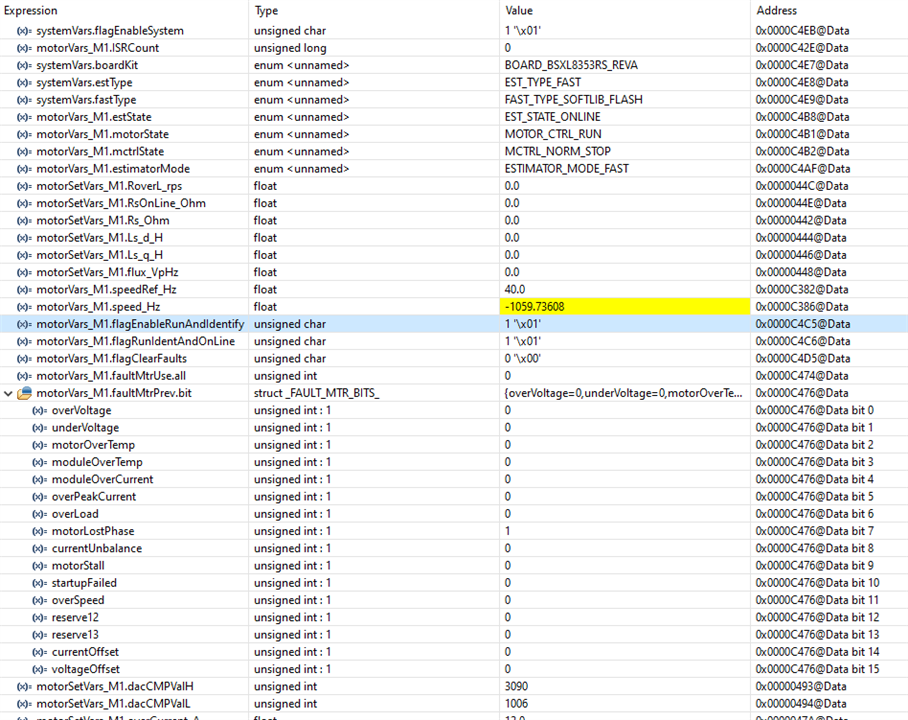
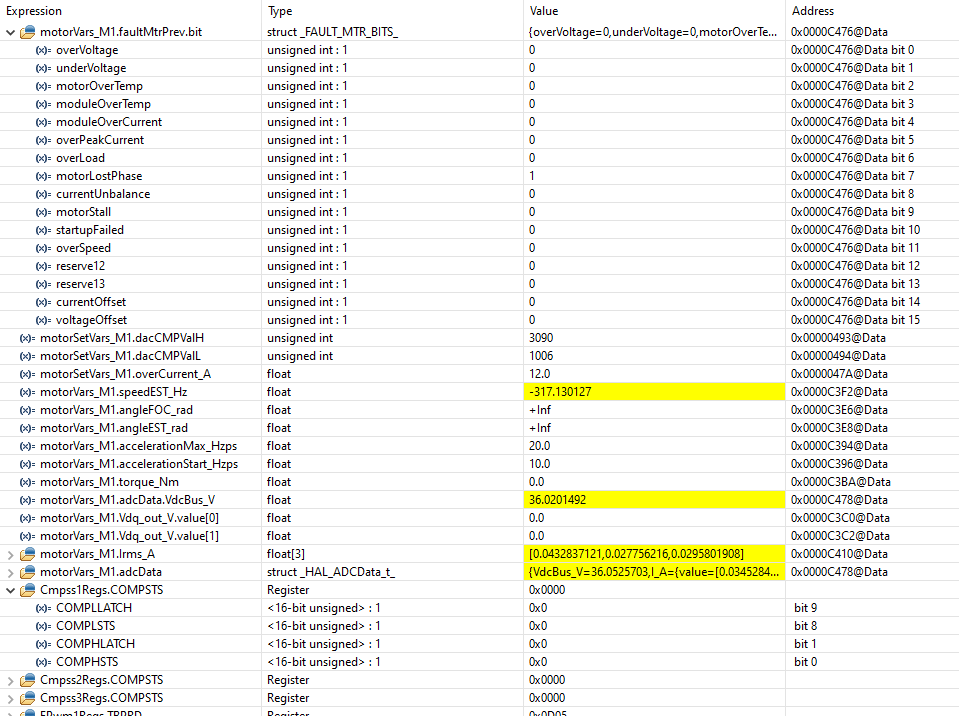
I am utilizing LAUNCHXL-F2800025C and a DRV8353RS-EVM to work through the Universal Motor Control Lab. In the Universal Motor Control Lab incremental build level 2. I am getting moduleOvercurrent faults. I have successfully completed the lab through build level 1. The DRV8353EVM does not indicate a fault nor do the registers from the 8353.