


Other Parts Discussed in Thread: MCT8316A, DRV8320
Hi,
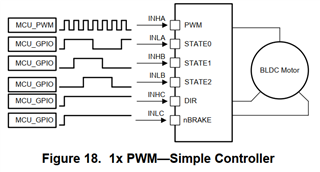
I want to control the BLDC motor I use in my project without a HALL sensor. For this, when I looked at the datasheet, I produced the HALL signals myself and the motor misfires. How can I stabilize this?
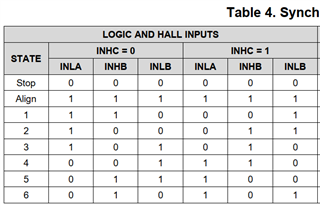
I open the outputs in the order indicated in the table above.
What am I doing wrong?

