Other Parts Discussed in Thread: DRV2604
Hi Expert,
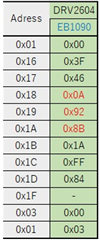
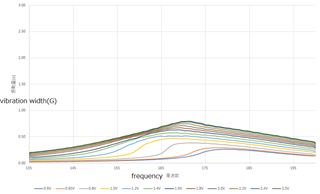
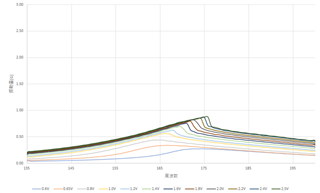
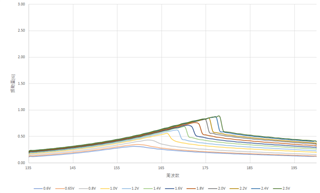
Mt customer have an issue of output waveform.
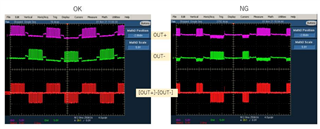
It is occurred by some motors, They have OK motor and NG motor even if same motor part#. They tried to replace another motor, Then, this issue was improved.
Also this issue have often occurred at low temp condition. (At 0C, 2/6 pcs NG)
Could you please give me your advice for the reason of this waveform?
What motor characteristics depend on this issue?
Thanks
Muk