


Hi everyone,
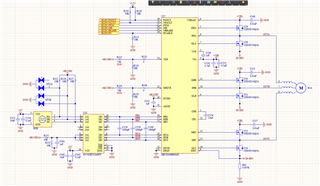
This is my schematic:
And source code:
void bldc_motor(void) {
HAL_Delay(2000);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3); // Start PWM
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 20); // Duty = 20%
HAL_Delay(1000);
HAL_GPIO_WritePin(BLDC_DIR_GPIO_Port, BLDC_DIR_Pin, GPIO_PIN_SET);// DIR = 1
HAL_GPIO_WritePin(BLDC_BRAKE_GPIO_Port, BLDC_BRAKE_Pin, GPIO_PIN_SET);// BRAKE = 1, turn-off brake
HAL_GPIO_WritePin(BLDC_EN_GPIO_Port, BLDC_EN_Pin, GPIO_PIN_SET);// EN = 1 - ON
for (int i = 0; i < 5; i++) {
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 50); // Duty = 50%
HAL_Delay(2000);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 20); // Duty = 20%
HAL_Delay(2000);
}
HAL_GPIO_WritePin(BLDC_BRAKE_GPIO_Port, BLDC_BRAKE_Pin, GPIO_PIN_RESET); // Brake = 0
HAL_GPIO_WritePin(BLDC_EN_GPIO_Port, BLDC_EN_Pin, GPIO_PIN_RESET); // EN = 0
}
The motor I use
http://www.wonsmart.com.cn/ws7040-24-v200-15655816895217949.html
Normally, the system works well and the motor still rotates, reverses, adjusts speed...
However, at some time I cannot start the motor.
If I deflect the rotor out of its current position the motor will rotate.
Please view attached video.


