


Hello
I got an evaluation board, but I haven't succeeded in controlling the motor rotation correctly.
What should I do to get closed loop control?
I roughly tried the following
1. Cannot Quick Start
I followed the Quick Start Guide, but the motor didn't spin.
→ Fault (: Lock current limit) is indicated
2. The recommended setting also failed to rotate the motor.
3. I manually set the motor parameters to skip the automatic measurement of MPET and the motor rotated.
But, the motor stopped at the moment of transition from open loop to closed loop.
→ Fault (: Abnormal BEMF) is indicated
4. When I changed the BEMF Constant register value from the setting in 3. above, Fault (: Abnormal BEMF) disappeared.
But, when it went from open loop to closed loop, the motor stopped.
→ The algorithm state of the motor became [Closed loop aligned], but the rotation of the motor stopped and it moved jerks.
5. I tried Manual Tuning from the GUI --Guided tuning settings --Inproving speed regulation, but the motor didn't spin well in a closed loop and it stopped.
Step A-D: I disabled the speed loop and closed loop, and I measured the A phase current.
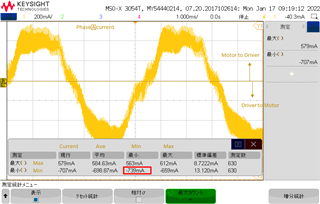
Step E: I didn't know what to fill in, but I entered the maximum measurement: 739 [mA] * 110 [%] = 813 in [FORCE_IQ_REF_SPEED_LOOP_DIS].
Step F: When I re-enable the closed loop, the motor stops and I can't proceed to the next step.
As a test, I changed [FORCE_IQ_REF_SPEED_LOOP_DIS] in the range 600-1000, but the closed loop didn't work.
The smaller this value, the larger the current when the motor stopped.
Regards,
Tetsuya K


