Hello,
I want to detect step-out.
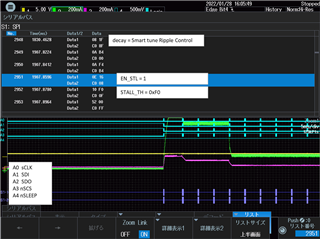
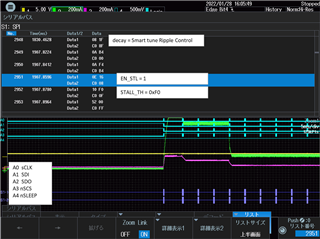
After it starts moving, it physically stops the motor. In this figure, TRQ_COUNT <STALL_TH is set, but FAULTstatus STALL = 1 is not set.
STALL_TH will not be rewritten, STL_LRN_OK = 1 will not be.
Why is the step out not detected?
Is it correct in the recognition that step-out detection occurs in this way?
<Configuration>
DECAY = 111b Ripple control mode
STL_LRN = 1
EN_STL = 1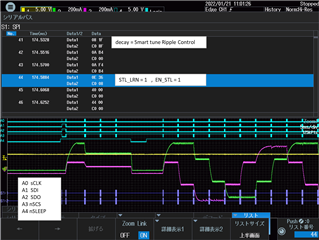

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.