Hi Team.
I'm working on synchronous operation with drv8313, but motor doesn't work.
And I don't know the meaning of synchronous and asynchronous rectification exactly.
Should I supply 3-phase trapezoidal wave to INx while synchronous driving?
I don't understand why this chip is so difficult to operate.
Could you explain how I can operate it easily?
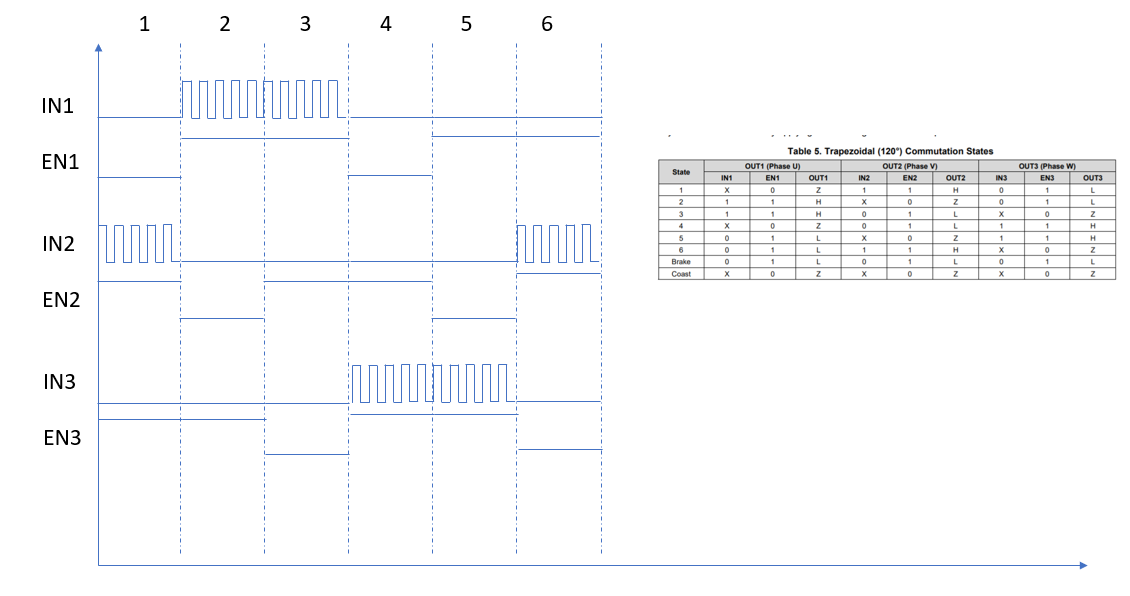
It doesn't work with Table 5. Trapezoidal (120°) Commutation States.
Thanks.