Hi team
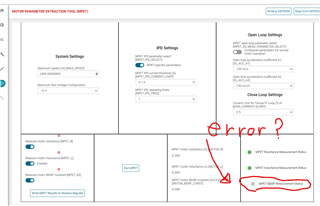
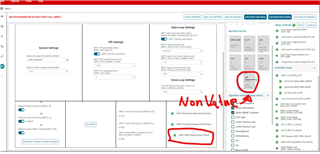
The motor stops in the middle of MPET( Motor parameter extraction tool) sequence.
If it stops, I can't perform MPET again without restarting the GUI tool and the board.
How can I do to measure motor parameter successfully and turn the motor?
I follow this video:
https://www.youtube.com/watch?v=Fvovin_3ajk
My Environment:
- GUI Ver: 1.1.4
- Motor: LDARC/KingKong GT1105-7000KV