


Other Parts Discussed in Thread: MOTORWARE, MCF8316A
Please confirm that the PI control loops are both parallel (not serial)
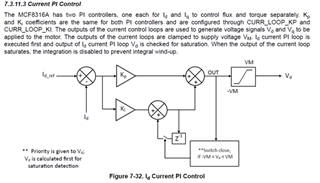
Id and Iq current loops are shown below:
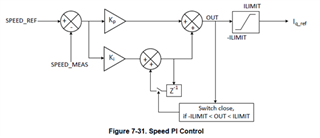
speed loop is shown below:
I have motor parameters provided by the manufacturer, have measured using external test equipment, have computed used MotorWare, and the MPET tool of the MCF8316A. Some values are 40% different! Which is the most accurate for use with the MCF8316A?
Auto loop compensation is a nice feature, but how are PI values scaled by ISR rates, Vbus voltage and current limits?
I believe I understand how to get the step response of the speed loop.
I don’t see a way to obtain the step response of the current loop.
