Other Parts Discussed in Thread: TMS320F28069F, TMS320F28069M, C2000WARE, MSP430F5529, , TMS320F28062F, TMS320F28068F, DRV8323, C2000WARE-MOTORCONTROL-SDK
Hi Team, seeking for some assistance.
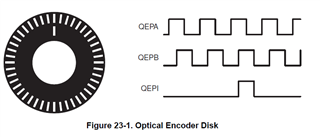
eQEP block is used to measure the angular position in the microcontroller. It uses the
voltage on the free phase line to detect the position.
If above statement is correct, then addition is:
We intend to use a hall sensor MT6825 from MagnTek whci gives output as absolute algular position in the form of 12 bit PWM or 18 bit SPI with available communication interface of 3 wire SPI/4 wire SPI. Can the eQEP take the sensor output as input to determine the agular position accurately?
Thank you.
-Mark