Other Parts Discussed in Thread: TMS320F28379D
Hello,
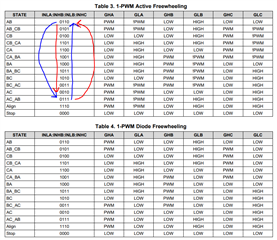
I am working on BLDC motor to control the speed with TMS320f28379D launchxl.
with 1pwm mode, i am able to control the motor in both direction ,but ...in one of the direction i am getting half of the speed than the other i.e. with 50% duty cycle motor is supposed to rotate 5000rpm in both the direction ,but in Clockwise direction getting only 2500rpm only.
What settings should be done for this?