Other Parts Discussed in Thread: DRV10983, , , TM4C123GH6PM, MSP-EXP430FR2355, MSP430FR2355
Hello,
we designed a new PCB with the MCF8316A and a microcontroller. We successfully used nearly the same PCB with the DRV10983 for years and only adapted it for the MCF8316A.
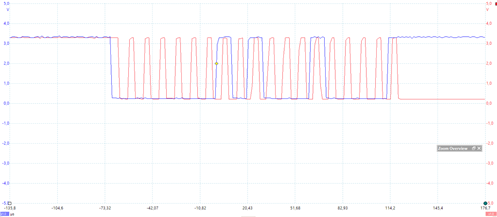
The problem is, that there is no I2C communication possible. After the first byte with the 0x01 address and the write bit, the MCF8316A does not send an ACK:
AVDD, DVDD and buck regulator voltages are as expected, so it seems to be soldered correctly.

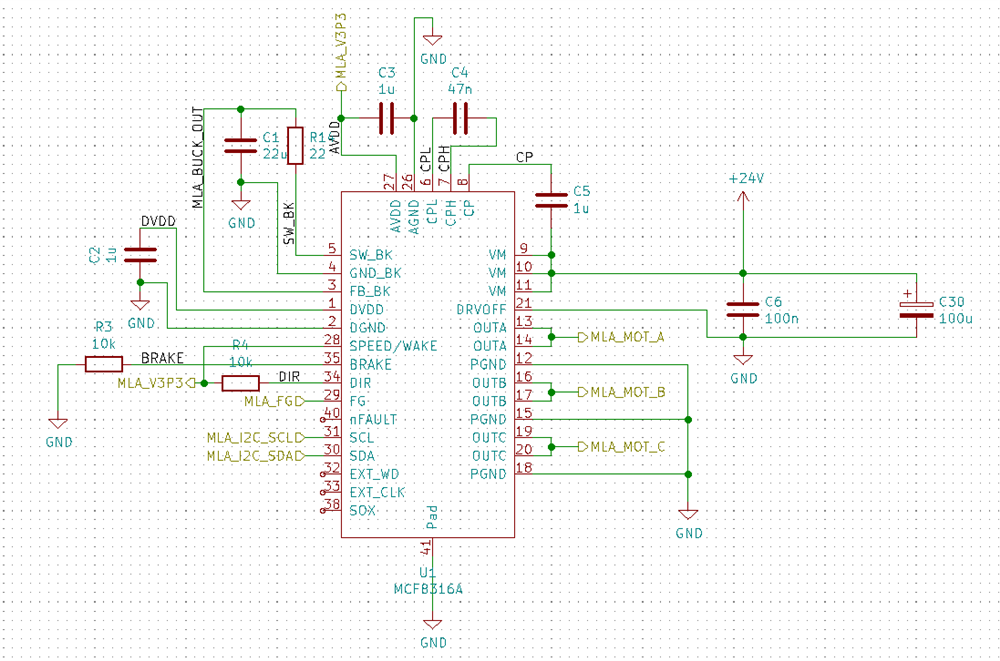 Could it be a problem that I connected the speed pin to AVDD? We had problems with a sleep version of the DRV10983 so I did this to make sure, that it can not go to sleep. Maybe this is not ideal but I would expect the I2C communication to work nervertheless.
Could it be a problem that I connected the speed pin to AVDD? We had problems with a sleep version of the DRV10983 so I did this to make sure, that it can not go to sleep. Maybe this is not ideal but I would expect the I2C communication to work nervertheless.