Other Parts Discussed in Thread: DRV8847
Hi,
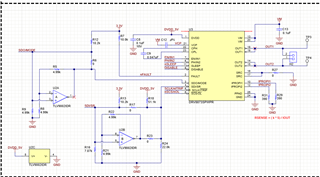
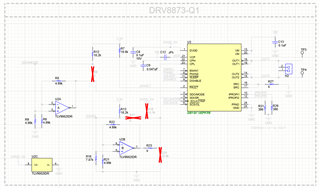
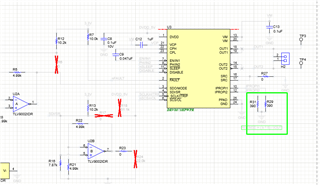
I need help related to DRV8873H EVM design files. Can anyone provide me DRV8873H EVM design files? I searched TI website and even if it says that it is DRV8873H EVM files but in actual it is S version files.
or
I need help to related to the function of OpAmp circuit created in S version EVM. I need a simple solution to control the DC motor speed and ON/OFF function. The specs of motors are as follows
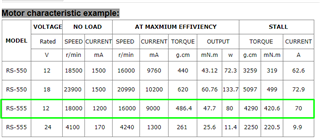
- DC Brushed 12V Motor
- 10A Current Rating
- Need speed control
- Simple interface with MCU i.e. PWM, EN etc. NO SPI or I2C interface. I would prefer solution like DRV8847 because i used it many times for low current motors