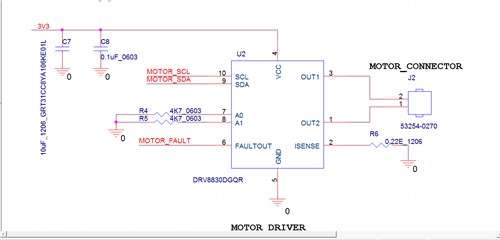
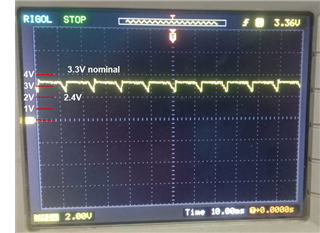
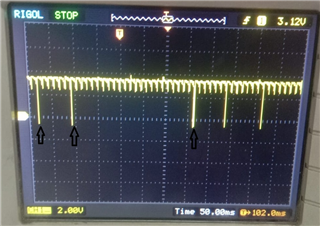
We are working on one project in which we have used DRV8830DGQR motor controller. As per datasheet when motor goes into stall condition, fault pin goes low and retains in low state till the fault condition is there. Practically while testing, we observed that it is giving pulse on fault pin. It does not retain in low state though motor is in stall condition. Also we are getting noise (low amplitude pulses) before getting the pulse on fault pin. It becomes difficult for host controller to sense the fault condition due to these multiple pulses.

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.