Other Parts Discussed in Thread: TM4C1294NCPDT,
Hi Everyone.,
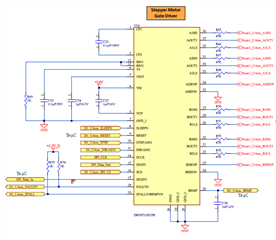
I am using TM4C1294NCPDT Microcontroller and DRV8711 Stepper Driver IC. In my code, we using the the stepper motor in SPI configuration, this motor can move three positions like, top, center and bottom. while running randomly motor stops suddenly and not responding to any command either forward or reverse. During the time we re not getting fault or STALL state. In this situation, once the Reset bit high manually, the stepper motor can be run 50 to 60 sequences. Please give me the solution for Motor stopping without STALL or Fault state.
If the motor can move these positions motor will be stop. But motor was not getting fault or STALL state. In this situation, once the Reset bit high manually,the stepper motor can be run 50 to 60 sequenxes.Please give me the solution for Motor stopping without STALL or Fault state.
When the Motor stops,we manually set the Reset Pin high,
Eg: if(g_Cal_LSU_Economizer_Motor.Reset==1)