Other Parts Discussed in Thread: , DRV10987
Hi Team,
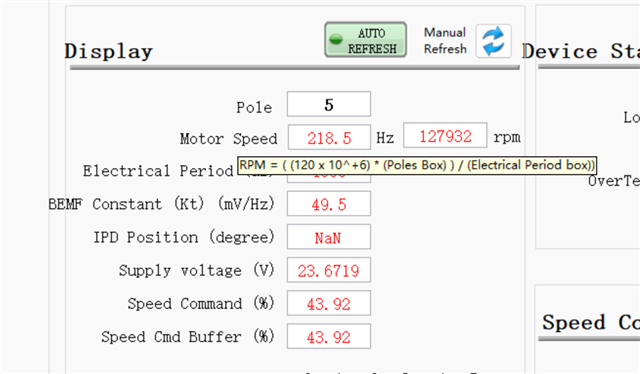
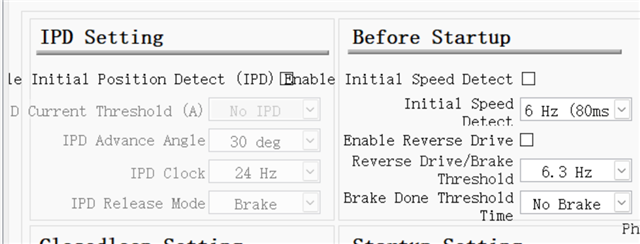
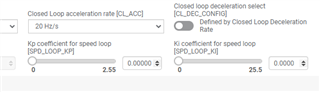
I have a question on MCF8316A. Now we set drvoff low, speed 10k 90%, break low, dir high, I2C is not set. AVDD 3.25V, DVDD 1.56V. But the motor is not working.
Are there any other parameter we need to set? Thanks!
BRs, Sherman