


Other Parts Discussed in Thread: DRV10970, MCT8316Z, MCT8316ZTEVM, MCT8316A
That being said, your document about tuning with this motor controller needs to be revised, almost needs to be totally rewritten. It seems to apply to a very very old version of the silicon.
Forgive me, I have yet to "tune" this motor. I intend to do that right now, or at least try. Considering the waveform I'm getting, I don't think it'll pan so well.
Anyway, where I'm going with this is that I've gotten my motor up and running on the MCT8316. It's spinning the right direction, has decent strength even though I haven't tuned it yet, however, the waveform is very noisy, and that noise translates to mechanical/audio noise from the motor. Even unloaded, the motor gets rather warm, I can't imagine it being good for the motor. More alarming, however, is that the motor I have attached to this controller takes half an amp to spin even though it's totally not loaded. The identical motor in-situ (with a little load, basically it's spinning a free wheel on a bearing) running the DRV10970 takes 1/10th of an amp. I have taken pictures of both the DRV10970 waveform and the MCT8316 waveform running 7.5v. The PWM frequency I'm using is about 100 kHz, just a little less than that actually. The PWM is generated with a 555 circuit.
Also, as a side note, the motor, if provided sufficient load, will suddenly switch direction, get considerably weaker and go about half speed. I suspect tuning may alter this behavior.
MCT8316 trace taken from the W coil wire: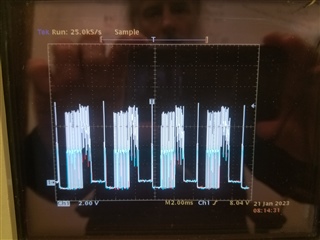
DRV10970 trace taken from the W coil wire: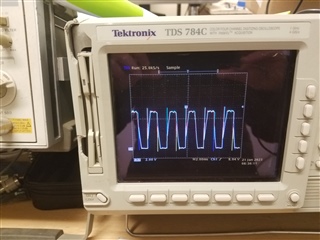
Thank you for any input you may provide.
