Other Parts Discussed in Thread: DRV10983
Hi team,
Previously, I used DRV10993-Q1 EVM board provided by TI to debug the drive motor, and controlled the motor speed in closed-loop mode through EVM GUI software. Then I saved the Settings of GUI software to obtain the values of 0x90~0x96 in seven registers. The seven registers were written in accordance with the operation steps of EEPROM Access. After the writing, the register was read and the parameters were written one by one successfully, but the motor did not work. May I ask if there is any problem with my setting?
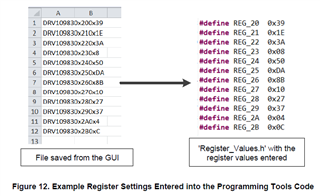
I found in the programming guide documentation that more registers are saved from the GUI than are actually saved. Why?