Other Parts Discussed in Thread: DRV8711, DRV8462, DRV8462EVM, , DRV8461, DRV8452
I am using DRV8434 to run a NEMA23 motor, with 48V (VM) and 1.7 (IMax), in smart tune. 3000pps and 8000pps2.
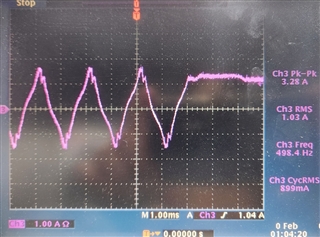
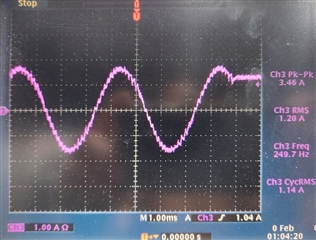
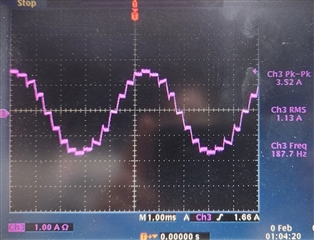
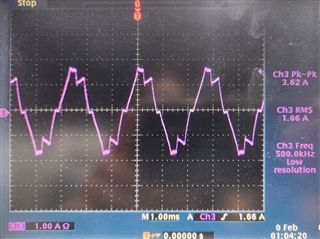
the motor current for the lower steps(1/4) is not comparable with higher steps, both attached.
changing the speed or Vref did not make 1/4 step any better.
same motor can give a very smooth 1/4 motor current graph when i run it using DRV8434 Eval kit.one thing to notice is that my step signal is on for 4usec, while its much bigger for your DRV8434Eval .
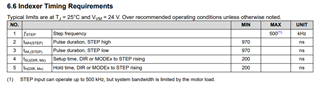
since the datasheet indicates the step frequency is 0- 50Khz, so 4usec must be fine, isn't it? if its the problem how come it only affects it at lower steps? is there any way i could make it work work well at 1/4 step.