Hello,
Check the H-bridge schematic bellow: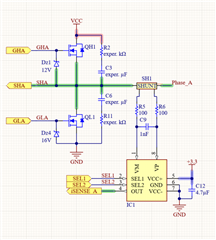
I'm going to use inline current sensing method to control a BLDC motor, using the DRV8353 driver.
So I need a suggestion for a suitable current sensor which capabilities are related to:
- Vcm >= 60V (desirable)
- Bidiretional (needed)
- Zero-Drift (desirable)
- Programmable-Gain
- Bandwidth for max gain > 100kHz (needed)
Note that.: I need a resolution of current not lower than 10mA DC for the max gain, so for a 12bit uC, I will ideally need a max gain of more than 100 considering a 1mOhms shunt resistor (consider also the max value for the shunt resistor is 2.5mOhm). For the min gain, a 12bit uC must measure a max current of at least 80A DC.
A nearly good solution is to use an INA225, but its Vcm is way lower than expected and I also don't know if this chip can handle a mA range. So, please anwer the questions:
1. Could you please indicate other products that fit in the specifications above?
2. Can you show the analysis you do to garantee the selected chip is capable of measuring a 10mA current? (show the analysis for the INA225)
3. In the iten above, please indicate the parameters in the datasheet that make possible to measure the 1mA range.